Японські інженери показали прототип роборуки, де роль захоплення для маніпулятора виконує жива мокриця чи морський моллюск хітон. Їх використали, щоб хапати і тримати шматок вати, пластиковий циліндр і дерев'яну пробку. Щоправда, живі частини роборуки діяли самостійно, керувати тим, як вони брали і відпускали речі, вчені не намагалися. Результати експериментів опубліковані на arXiv.

Мокриця тримає шматок вати лапками. TADAKUMA Mechanism Group / Youtube
Навіщо використовували живих тварин?
Біоробототехніка включає не лише використання живих істот як джерела натхнення для інженерів, а і їхнє безпосереднє залучення до виконання різних завдань. Такі гібридні роботи можуть бути більш функціональними, адже інженери використовуватимуть природні здібності та поведінку живих організмів. Наприклад, таргани-кіборги, якими можна дистанційно керувати, можуть брати участь у пошукових операціях. А слизовик у годиннику може живити його, якщо за твариною доглядати.
Японські ж інженери з Ямаґатського університету спільно з колегами вирішили перетворити мокриць з сімейства Armadillidiidae та морських панцирних молюсків класу Polyplacophora (хітонів) на частину роборуки. Мокриці вміють рефлекторно згортатися у клубок, а хітони — чіплятися, наприклад, за каміння за допомогою присосок, тож, як пишуть науковці, поведінка цих тварин ідеально підходить для захоплення невеликих і легких предметів.
Як зробити роборуку з мокриці?
Для свого експерименту інженери зловили біля університету мокрицю, а також привезли зловленого в Японському морі хітона, якого поселили в акваріумі. Механічні частини роборуки із кріпленнями для тварин вчені роздрукували на 3D-принтері. Для мокриці вони створили фіксатор з гнучким джутом, який оперезував тварину, а молюска закріпили за допомогою клею на його екзоскелеті.
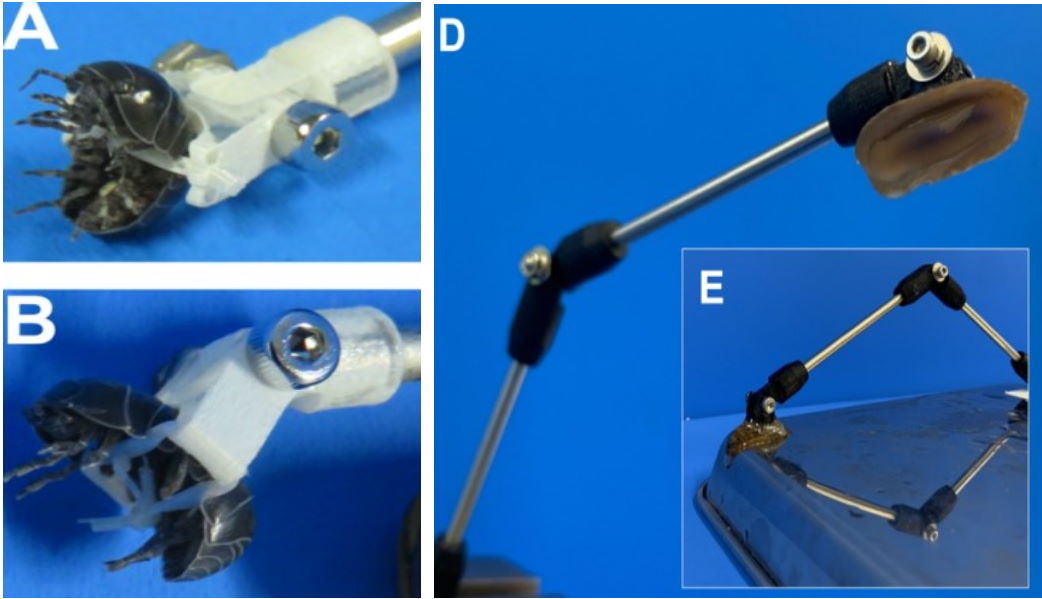
Мокриця (А, В) та хітон, закріплені на роборуці. Kenjiro Tadakuma et al. / arXiv.org
До мокриці інженери підносили шматочки вати, які вона залежно від кріплення, могла хапати і тримати або скручуючись, або перебираючи ніжками. Згортатися тварина починала одразу, як тільки відчувала дотик, а відпустити вату вона могла вже через 115 секунд, самостійно розгорнувшись. Хітон же завдяки присоскам міг тримати більші предмети, як-от пластиковий циліндр вагою у 53 грами чи дерев'яну пробку, яка важила 25 грамів. Цікаво, що звичайні присоски до дерева чіплятися не можуть. Експерименти з хітоном проводили у воді.
Випробування роборуки з хітоном в акваріумі. TADAKUMA Mechanism Group / Youtube
Автори дослідження підкреслюють, що у ході експериментів жодна тварина не постраждала: мокрицю випустили, а хітон через 6 тижнів після випробувань продовжив жити в акваріумі. У майбутніх дослідженнях вчені сподіваються розробити способи керувати поведінкою тварин, наприклад, за допомогою світла.
Раніше ми розповідали, як американські інженери використали для роборуки мертвого павука. Закачуючи в його тіло повітря, вчені могли керувати захопленням та підіймати навіть в 1,3 раза важчі за самого павука предмети.





