Японські інженери представили м'якого робота з п'яти блоків каркасної системи стискання-розтягування вагою всього 400 грамів, який вміє пасивно пристосовуватися до середовища. Нейромережа спонукає його рухатися вперед у невідомих напрямках, а сам робот здатен пролізти між стінками шириною від 150 міліметрів. Розробку вчені представили у журналі IEEE Robotics and Automation Letters.

Suzumori Endo Robotics Laboratory / YouTube
Як змусити робота лізти під землю?
Однією із задач робототехніки є можливість створити робота для дослідження невідомих, складних або небезпечних місць. Щоб у робота була така можливість, йому потрібно розпізнавати форму середовища. Наприклад, за допомогою лідарів або лазерних дальномірів, які справляться і в темряві. Але у м'яких роботів, які відрізняються високою гнучкістю, є можливість фізично відчувати особливості середовища, пасивно адаптуючись до його форми. І автори цієї роботи, інженери Токійського технічного університету, взялися за створення м'якого робота, який зможе влазити у невідомі середовища і при цьому вільно ними рухатися, використовуючи контакт свого тіла з ним, розпізнаючи форму за даними про положення частин свого корпусу.
З чого склали робота?
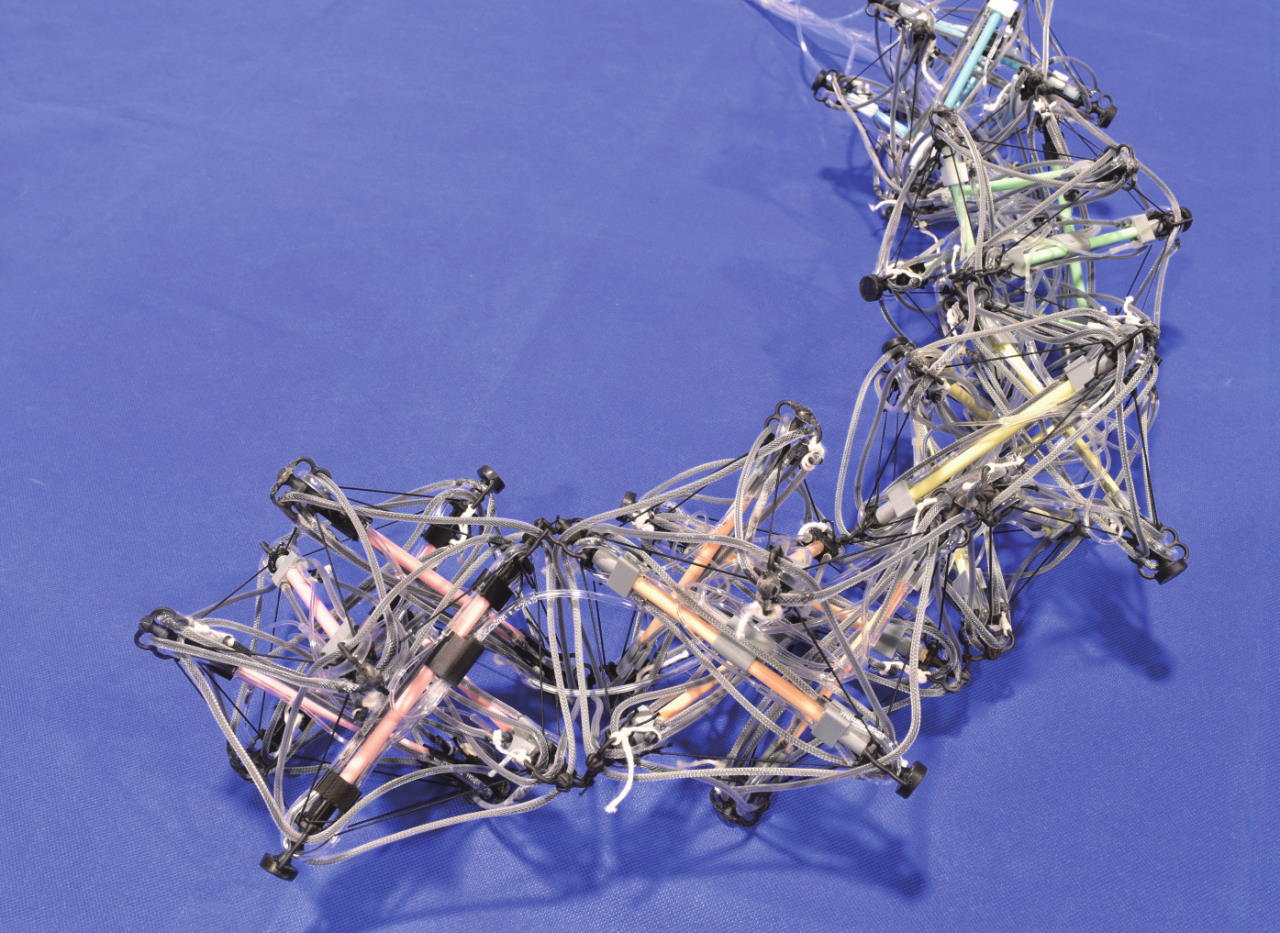
У невідомому середовищі робот повинен бути досить легким, щоб не заважати довкіллю. Тому інженери зосередилися на конструкції тенсегріті (від англ. словосполучення «tensional integrity» — поєднання шляхом натягування) — принципі побудови конструкцій зі стрижнів і тросів, в яких стрижні працюють на стиск, а троси — на розтяг. Тільки замість тросів у створеного робота-черв'яка штучні м'язи. Раніше подібних роботів вже вдавалося навчити розпізнавати різні форми за допомогою рекурентних нейронних мереж, які використовували як дані знання робота про його власну форму і зміну положень його частин тіла, припускаючи рух у певному діапазоні.
Ryota Kobayashi et al. / IEEE Robotics and Automation Letters, 2022
Спростити завдання для алгоритмів можливо, якщо робот активно деформується і зазнає значних змін своєї форми, рухаючись. Щоб забезпечити помітну деформацію як в осьовому, так і в радіальному напрямках, інженери звернулися до штучних м'язів, здатних створити достатні зміни положень частин конструкції робота. Зрештою, робот зможе увійти в невідомий простір і розпізнати просторову форму навколишнього середовища, змінюючись під його впливом.

Suzumori Endo Robotics Laboratory / YouTube
Особливістю цього робота став принцип конструкції м'язів. Вчені використовували 4/3 м'язового витка до шести з 12 трикутників у структурі тенсегріті, що призводить до максимальної їхньої деформації у відповідь на невелику зміну довжини штучного м'яза. Робота створили з п'яти блоків таких структур із 10 парами штучних м'язів, а всі компоненти для робота вчені виготовили за допомогою 3D-принтера. У рух робота наводить компресор, який прикладає тиск до 0,4 паскаля, а мікроконтролер контролює деформації. Вага робота без урахування пневматичних трубок становить всього 397 грамів.
Куди заповз робот?
Щоб оцінити робота вчені запускали його у щільні незручні тунелі шириною від 150 до 240 міліметрів. Завдяки своїй гнучкості робот може контактувати своїм тілом зі стінками тунелів навіть якщо ширина між ними змінюється. Також інженери вирішили перевірити здатність робота долати силу тяжіння: наділений додатковими протиковзними гумовими стрічками він зміг дертися по трубі з внутрішнім діаметром 210 міліметрів. Крім лабораторних лабіринтів робот долав навіть вкопані для нього земляні траншеї.
Suzumori Endo Robotics Laboratory / YouTube
Це не перший робот, якого можна відправити на роботу під землю. Наприклад, цей змієподібний американський робот навчився рити «носом» землю, здувати навколо себе пісок та несподівано виринати з-під нього. Крім того, в шахту або печеру можна запустити навіть дрон, якщо наділити його надійним захистом і навігаційними навичками від зіткнень.
Suzumori Endo Robotics Laboratory / YouTube