Вчені вперше випробували технологію навігації MuWNS, яка працює завдяки мюонам — частинкам, які народжуються від взаємодії космічних променів з атмосферою Землі. Система працює подібно до системи GPS, однак замість космічних супутників, покладається на мюонні детектори. MuWNS стане у пригоді для підземної навігації роботів, у закритих приміщеннях чи під водою, де GPS-приймачі менш ефективні. Про успішні випробування MuWNS розробники повідомили у iScience.
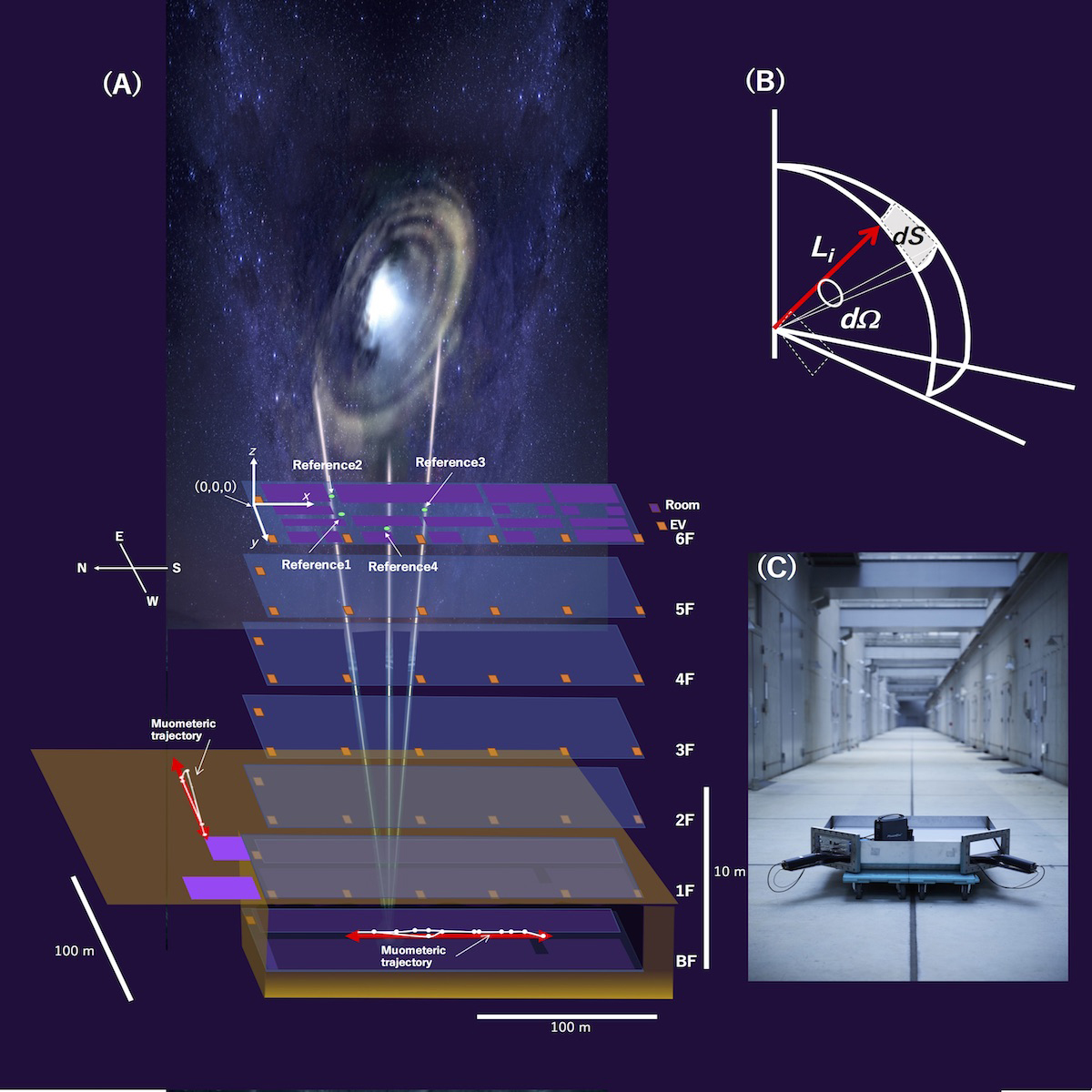
Принцип роботи мюонної навігації. Hiroyuki K.M. Tanaka et al. / iScience, 2023
Навіщо взагалі звертатися до космічних променів?
Сучасні супутникові навігаційні системи, зокрема і GPS, використовують сузір'я навколоземних супутників, які надсилають про своє положення на орбіті і точний час, що використовує, наприклад, смартфон, щоб оцінити своє положення. Аби розрахунки були точними, навігатори також враховують і затримки часу, за який радіосигнал від супутників досягає приймача. Втім, товща землі чи води є для радіохвиль значною перешкодою, тому дослідники шукають альтернативних способів навігації у цих середовищах. Космічні промені на цю роль вперше випробували науковці з колаборації muPS.
Як орієнтуватися за космічними променями?
Для своєї системи MuWNS (wireless muometric navigation system) вчені вирішили використати мюони — заряджені елементарні частинки, масивніші за електрони, які народжуються у верхніх шарах земної атмосфери при зіткненні з нею космічних променів. Мюоні потоки на Землю безперервні, а самі частинки мають значну проникну здатність та можуть проникати глибоко під землю чи воду. Їх вже використовують, наприклад, археологи, щоб досліджувати пам'ятки, до яких нема доступу, як-от надра єгипетських пірамід.
Художнє зображення того, як мюони бомбардують Землю. Hiroyuki K.M. Tanaka
Аби пристосувати мюони для навігаційних цілей, потрібно розмістити кілька детекторів частинок: детектори-приймачі, з якими визначатимуть положення, і детектори-еталони. Аналогічно роботі супутникової навігації, положення детектора-приймача, визначається за часом, необхідним мюонам для проходження між ним та еталонними детекторами, з урахуванням кута між ними.
Як спрацювали мюони?
В експериментах, аби випробувати мюонну навігацію, у підвалі будинку вчені розмістили детектор-приймач, а еталонні детектори — кілька поверхами вище. Використовуючи час проходження мюонів та кут між детекторами, положення детектора-приймача вдалося визначити з точністю від 2 до 25 метрів, залежно від відстані між детекторами. За словами розробників, робота MuWNS порівняна з ефективністю GPS, а також значно ефективніша за існуючі методи підземного і підводного позиціонування. У майбутніх дослідженнях науковці планують зменшити розміри детектора-приймача, а також покращити алгоритми навігації, щоб враховувати особливості поширення мюонів.
Розробка вчених допоможе у навігації, наприклад, роботів, що оглядають каналізації, працюють у шахтах чи плавають під водою.