Команда норвезьких і швейцарських вчених представила чотириногого робота, який має працювати у парі із дроном. Обидва вміють картографувати місцевість за допомогою камер і лідарів, однак разом вони набагато ефективніші, ніж окремо. Тому на спині робота передбачили майданчик для посадки дрона, а також спільні для обох системи планування руху, які і вказуватимуть, якому роботу куди слід рухатися. Свій підхід для підземної роботи роботів інженери представлять на конференції IROS 2022, а поки деталі доступні у препринті на arXiv.

Пара робот і дрон на змаганнях DARPA Subterranean Challenge. Evan Ackerman / IEEE Spectrum
Навіщо роботу дрон?
Чотириногі роботи добре зарекомендували себе як стійкі до перешкод платформи, які можуть не лише побігати сходами або лісом, а і пронести на собі вантаж. Втім, у той же час їм не доступна більшість задач, які з легкістю розв'язують дрони — швидке переміщення, можливість просто перелітати перешкоди замість перелазити та врешті можливість бачити місцевість з висоти польоту. Натомість дрони страждають від обмежень, пов'язаних з об'ємом акумулятора, і тому їхні місії часто обмежуються десятком хвилин.
Тому інженерам з Норвезького університету науки і технологій та швейцарського технічного університету ETH Zurich здалося гарною ідеєю поєднати цих два типи роботів — повітряного і наземного — з усіма їхніми недоліками і перевагами. А випробувати їх вирішили у найскладнішому для обох середовищі — університетських підвалах.

Evan Ackerman / IEEE Spectrum
Як подружити дрон з ходячим роботом?
Ідея інженерів полягає у наступному: чотириногий робот ANYmal є «головним» або материнським для дрона, а тому виконує основну частину завдання з дослідження і картографування місцевості. Однак якщо він стикається із обмеженнями, наприклад, не може пройти або потребує додаткових даних, він може передати команду дрону, який вирушить на завдання. Про дрон, який використовують вчені, ми, до речі, вже розповідали — це RMF-Owl від норвезьких розробників, який спеціально був створений для роботи під землею, і вже навіть випробуваний в одній із шахт. ANYmal може безперервно працювати близько години, у той час як дрону заряду вистачить не більше ніж на 12 хвилин польоту. І тому вони потрібні один одному.

Пара робот і дрон на змаганнях DARPA Subterranean Challenge. Evan Ackerman / IEEE Spectrum
На роботі дрон їздитиме верхи у спеціальній каретці із гнучким ременем, який підтримує його, а також електропостійним магнітом (electropermanent magnet), який і дає можливість випустити дрон за потреби. Обидва роботи підтримують зв'язок один з одним, а також мають бортові камери і лідари для картографування і навігації. Задум інженерів полягає у тому, щоб обидва працювали з однією мапою в узгодженій системі координат, зберігаючи при цьому можливість оновлювати ціі мапи незалежно один від одного.
Як попрацювала пара?
Щоб оцінити ефективність такої парної роботи, вчені запустили їх походити підвалами університету ETH Zurich, де вони мали долати недоступні обом окремо перешкоди. Так, коли чотириногий завершив дослідження першого поверху, він випустив дрон політати на другому, а потім RMF-Owl повернувся йому на спину. Загальна довжина шляху, яку вдалося пройти обом роботам самостійно склала 400 метрів, однак при цьому їм вдалося побудувати повну мапу того, що вони зустріли. Цікаво, що під час одного з автономних випробувань, чотириногий робот вирішив випустити дрон, коли зустрівся із роздоріжжям: сам він пішов одним шляхом, а дрон полетів іншим.
Свою роботу вони завершили, коли дійшли до глухих кутів у коридорах, а потім прийняли рішення повернутися на початкові позиції. Причому дрон спершу повертається до робота, а вже потім вони разом направляються на місце початку місії. І хоча свою систему вчені випробовували під землею для змагань DARPA Subterranean Challenge, вони зазначають, що пара зможе працювати у будь-яких умовах, які потребують дослідження і картографування.
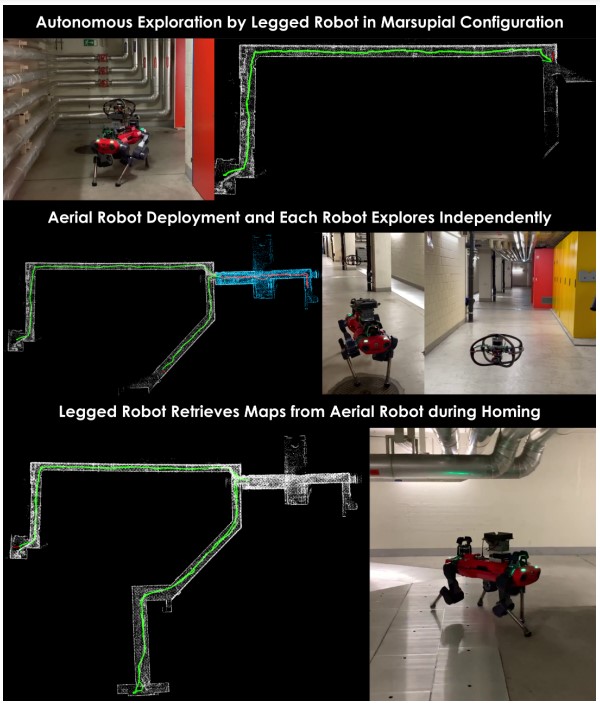
Як дрон і робот вирішили свою проблему із роздоріжжям. Paolo De Petris et al., 2022
Ми не вперше розповідаємо, як інженери обходять обмеження своїх роботів, поєднуючи їх разом. Наприклад, маленькі роботи, коли збираються гуртом, можуть виносити сміття та носити невеликі вантажі. А рій дронів може разом винюхати джерело витоку газу.
Який ще робот роботу пара
🤝Якщо навчити дрони співпрацювати, то вони перенесуть вантаж. Централізована система поєднала чотирьох
🏛️Звісно, чотириногий і летючий. «Спот» від Boston Dynamics, наприклад, вже працює охоронцем Помпей в парі із дроном
🛋️ А одноруких роботів співпраці навчило спільне перенесення дивану