Звичайний бордюр або сходинка перетворюються на перешкоду навіть для чотириногих роботів не лише якщо потрібно піднятися, а і коли потрібно спуститися. І щоб роботи не втрачали рівноваги, команда американських інженерів запропонувала наділити їх рухомим хвостом та пропріоцепцією. Згідно з симуляцією, такий робот зможе стабілізувати своє положення навіть якщо зміна висоти більша у півтора раза за висоту його ніг. Свою ідею дослідники представили на конференції ICRA Workshop on Legged Robots in 2022.
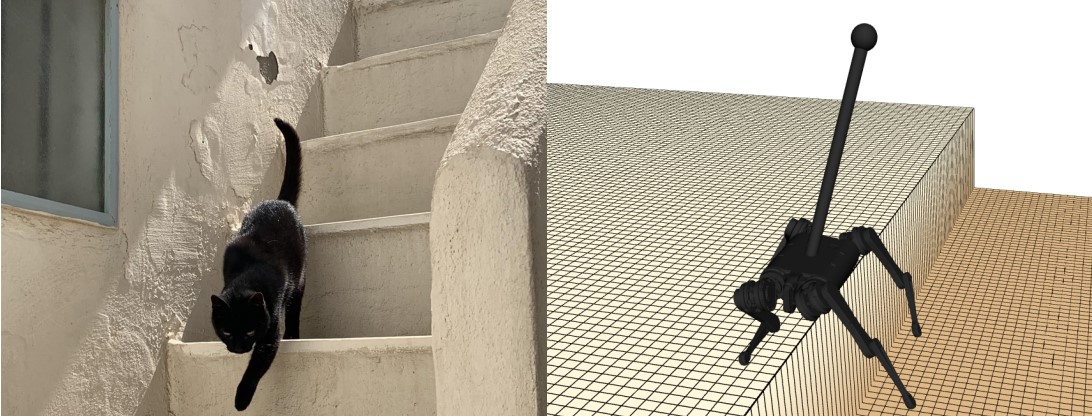
У симуляції цей робот відчуває себе котом. Yanhao Yang at al., 2022
Чому роботи падають?
Конструкція з чотирма ногами забезпечує швидке переміщення та складні маневри, що робить чотириногих роботів ідеальними для завдань на складній місцевості, таких як моніторинг навколишнього середовища, доставка та допомога при стихійних лихах. Однак роботи досі обмежені у здатності долати екстремальні ландшафти, які зазвичай зустрічаються за межами лабораторій, де їх випробовують. Зокрема їм складно долати перешкоди із перепадами висот, де невизначеність у наступному кроці призводить до падіння. Натомість у той же час у тварин багато підходів, щоб долати перешкоди. Наприклад, кішки зондують поверхню лапами у пошуках місця, яке забезпечить їм наступний безпечний крок. Власне на це і звернули увагу інженери з Університету Карнегі — Меллон і вирішили застосувати до свого робота.
Як навчити робота ходити як кіт?
Одним із найпоширеніших підходів для того, щоб забезпечити роботу стійкість, є використання екстероцептивних датчиків, наприклад камер глибини або лідарів, які забезпечують практично готові карти місцевості. У той самий час, щоб уникнути помилок, можна покластися ще один варіант адаптації до неструктурованої місцевості — пропріоцепцію. Так контролери роботів реагуватимуть на зміни власного положення, щоб підлаштуватися під них. Обійти складні системи сприйняття та проєктування динаміки руху можна за допомогою пасивної стабілізації положення. Звідси й тягнеться ідея причепити чотирилапому роботу хвіст. Однак, на відміну від подібних ідей, які реалізовували з роботами раніше, хвіст запропонували зробити рухливим, з двома ступенями свободи.
Так їхній робот зможе використовувати свої пропріоцептивні датчики як орієнтири контакту, тіла, точки опори та місцевості, а свій хвіст для пасивної підтримки ніг.
Як роботу допоможе хвіст?
Основна мета управління хвостатим чотирилапим роботом полягає в тому, щоб використовувати хвіст для доповнення кінематично обмежених ніг при втраті роботом рівноваги. Для цього потрібно, щоб контролер руху робота враховував нелінійну динаміку хвоста, і при цьому бажано окремо від ніг робота. У роботі інженери скористалися методом NMPC (Nonlinear Model Predictive Control), який розділив управління і хвостом, і ногами робота з допомогою одного контролера.
Ходу робота спланували таким чином, щоб він незалежно від своїх попередніх кроків планував наступні, орієнтуючись на інформацію від своїх пропріоцептивних датчиків. У підсумку, протестувавши в симуляції різні варіанти ходьби чотирилапого робота — з пропріоцептивними датчиками і без, з хвостом і без — вчені дійшли висновку, що ймовірність успіху без хвоста значно зменшується зі збільшенням висоти сходів, з яких спускається робот, а якщо обійтися і без пропріоцепції, і без хвоста, то робот швидко втрачає оптимальний набір кроків і відхиляється від свого номінального положення.
Робот у симуляції без пропріоцептивних відчуттів, з ними, а також з ними так хвостом. Yanhao Yang at al., 2022
Результати моделювання непередбачених змін висоти показали, що метод може стабілізувати пересування за зміни висоти до 1,5 довжини ноги робота. У майбутній роботі інженери планують протестувати свій підхід і в інших незручних для пересування робота ситуаціях, а також випробувати своє припущення на реальному прототипі.
Коти не вперше стають натхненням для інженерів, коли йдеться про ефективне пересування роботів. Наприклад, цього робота «мінігепарда» навчили приземлятися на ноги після падіння з висоти.
Robomechanics Lab / YouTube
Більше чотириногих улюбленців інженерів:
🧤 Пара роботів, якими дистанційно покерували за допомогою рукавичок із датчиками захоплення руху (motion capture)
🏎️ Робот на чотирьох колесах замість кінцівок, який може ставати на задні ноги, видиратися на сходи і проїжджати під столами
🏛️ А всім знайомий «Спот» від Boston Dynamics тепер працює на посаді охоронця у Помпеях