Італійські інженери навчили свого робота-маніпулятора самостійно займатися пранням: він може взяти речі з кошика для білизни, помістити їх у пральну машину, закрити дверцята та обрати режим прання, самостійно обравши потрібні налаштування на дисплеї. Зі своїм завданням робот справився у 84 відсотках спроб та у майбутньому має брати участь у випробуваннях пральних машин. Як привчити робота до хатніх справ, вчені описали у статті, яку представили на конференції Human Friendly Robotics.
New Scientist / YouTube
Чому робота навантажили саме пранням?
Знайти і навчитися вправно маніпулювати такими речами як одяг, які легко деформуються, є дуже складним завданням для поки не таких поворотких роботів, яким така дрібна моторика дається важко.«Перепрофілювати» робота, який більшу частину свого життя переносив стійкі до деформацій предмети, яким не могло б нашкодити надто сильне стискання, наприклад, доволі складно.Зокрема роботам потрібно навчитися не просто виявляти потрібну їм річ, а і знайти зручну позу для того, щоб її підхопити, мати шаблони дій, якщо її потрібно буде покрутити у руках, у випадку якщо вона почне падати. Необхідна сила контакту визначається вже деформацією певного об'єкта у руках робота, а отже і свою силу він має розраховувати, враховуючи нові форми.
Втім, якщо роботи зможуть працювати з чимось складнішим, то їх можна буде допустити до більшої кількості виробництв. І у цій роботі інженери Болонського університету звернули увагу на пральні машини. Автоматизація цього процесу із залученням роботів може пригодитися і в побутових, і промислових масштабах, а від робота це вимагає вміння автономно не просто брати у руки одяг, а і працювати з інтерфейсом іншої техніки. Тобто і можливості роботів розширити, і тестування побутової техніки спростити.
Як довірити роботу білизну?
У своїй роботі автори представляють два алгоритми для роботизованого маніпулятора: перший має навчити його хапати і тримати одяг, а другий — розбиратися із тим, як працює пральна машина. Найпростішим способом взяти тканину є знайти на ній складку. Тому робота наділили зором з 3D-камерою та алгоритмом, який за скупченням точок на поверхні шукатиме найзручніші для підхоплення складки на тканині. Наступний крок не менш складний. Завантажити підхоплений одяг у барабан пральної машини містить у собі кілька підводних каменів: наприклад, може статися так, що частина завантаженого одягу звисатиме і дверцята не вдасться закрити, або робот взагалі не зможе донести річ до цілі. Тут вчені пропонують повторити той самий алгоритм, який шукає на тканині складки, щоб знову підхопити її та все ж довести справу до кінця.

Так робот побачить одяг, який не зміг повністю потрапити у барабан пральної машини. Wendwosen B. Bedada et al.
Далі робот має запустити пральну машину. Тут дослідники вирішили скористатися глибинними нейромережами, які будуть зіставляти побачене за допомогою камери роботом зображення дисплея із модельним, на якому вони навчалися. Так він отримає координати цифр, символів та світлодіодів, які допоможуть вибрати програму прання. У підсумку, в ході експериментів із пральною машиною, нейромережа правильно класифікувала 12 режимів на дисплеї.
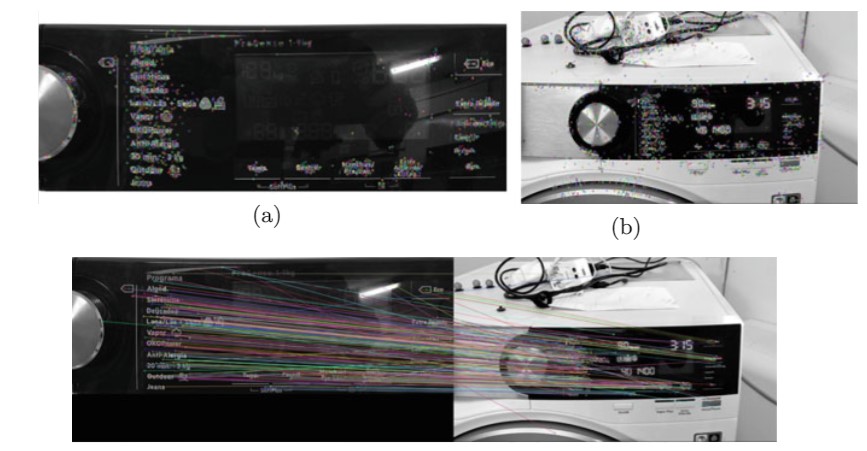
А так нейромережа допомагає розібратися із роботою пральної машини. Wendwosen B. Bedada et al.
Робот зможе зібрати брудні шкарпетки з-під дивану?
Для випробування робота інженери довірили йому низку речей різної жорсткості: від пари джинсів до бавовняного простирадла. Для кожної випробуваної тканини провели по понад 10 випробувань на схоплювання. Крім того, одяг вчені також додатково розвісили вздовж дверцят барабана пральної машини, щоб імітувати неправильне завантаження. У спробі виправити це, робот робить спробу повторно підхопити одяг, переміщує захоплену тканину вертикально до центру барабана, а потім відпускає її з руки. Зі 158 різних спроб взяти одяг робот впорався у 84 відсотках випадків. Невдачі були пов'язані з помилковим визначенням складок на тканині.
Шкарпетки, на жаль, у випробувальний набір одягу вчені не підклали, та і загалом не планують використовувати свої алгоритми для комерційних роботів-прачок. Натомість вони пропонують їх виробникам пральних машин, щоб вони використовували роботів у своїх випробуваннях. У майбутньому вчені планують залучити роботів і до посудомийних машин.
Роботи займають все більше сфер нашого життя, але досі продовжують вчитися, здавалося б, простих для нас речей. Наприклад, дрібній моториці у хапанні монеток зі столу (без магнітних пальців) або у чищенні бананів.
А ось роботи, яких вже можна долучити до хатніх справ:
🍷Два однорукі роботи, які зможуть налити вам вина (один з них чотириногий)
🥂А цей шестиколісний зможе підвести ще кілька келихів, навіть якщо доведеться долати гірки
😻А раптом вам все ж доведеться вийти з дому, то цей колісний робот пограє з вашим котом і навіть погодує його





