Італійські інженери дослідили, як рослини можуть «рухатися», підлаштовуючи ріст до умов довкілля, та спробували передати цю навичку контролеру для робоманіпулятора. У результаті, їхній контролер приводив маніпулятор у рух, використовуючи дані датчиків наближення та керуючи ним через систему сухожиль. Вчені вважають, що їхній підхід буде корисним м'яким роботам для роботи у незнайомих середовищах. Своє дослідження вони представили на конференції IEEE International Conference on Soft Robotics.
М'який маніпулятор, який створили вчені. Enrico Donato et al. / arXiv, 2023
Як рослини допомогли вченим?
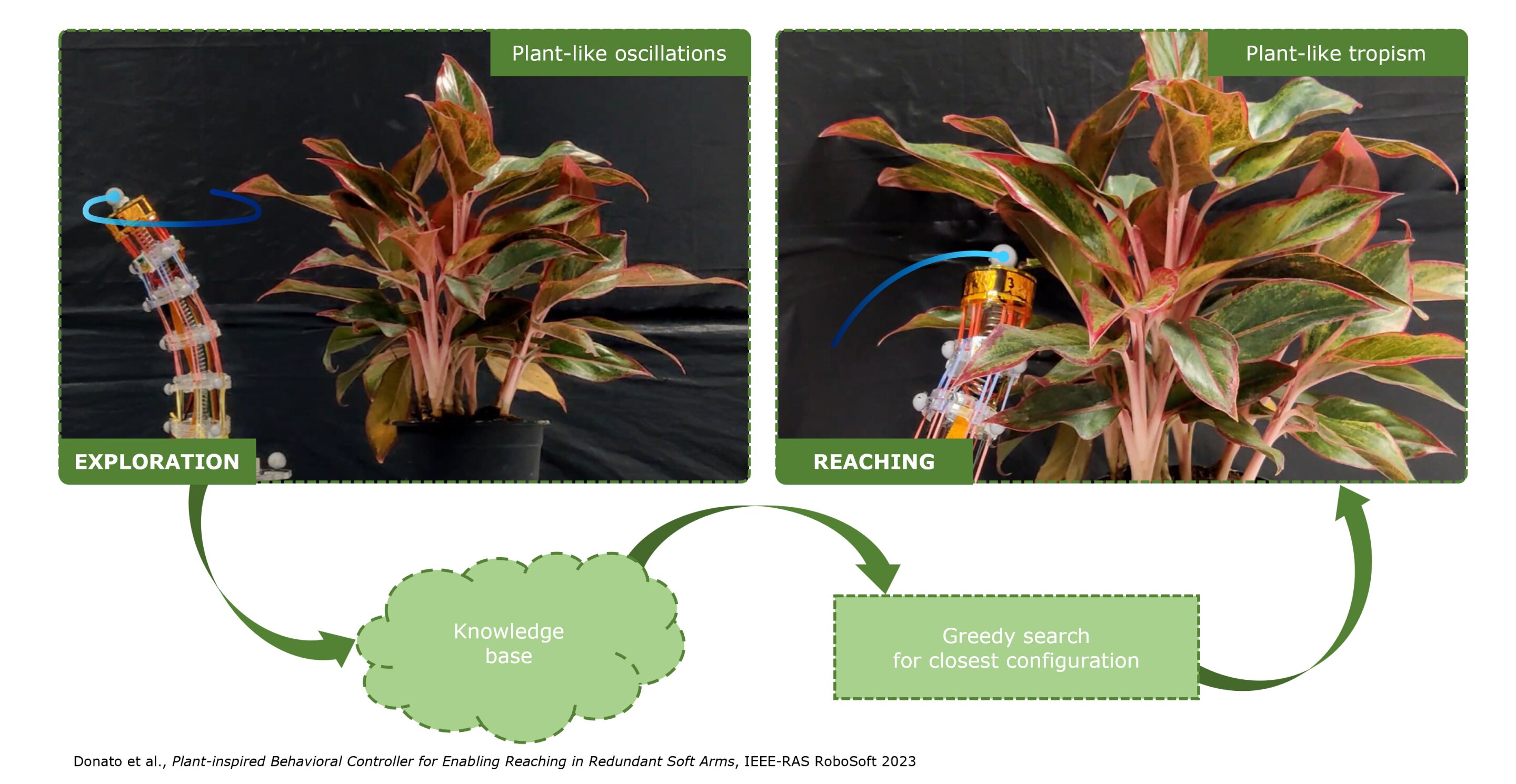
Рослини мають можливість адаптуватися до змін у навколишньому середовищі, змінюючи своє положення через зростання чи зміну форми, щоб уникнути або, навпаки, наблизитись до подразника, як-от сонячного світла, хімічних речовин, води тощо. Цим надихнулися італійські інженери з Вищої школи Сант-Анни та спробували відтворити у своєму контролері для м'яких роботизованих маніпуляторів.
Дослідники надрукували гнучкий актуатор на 3D-принтері з 9 сухожиллями, які можуть згинати та скорочувати його. Контролер для керування сухожиллями запрограмували реагувати на датчики наближення, встановлені на маніпуляторі. Контролер, реагуючи на наближення, активує пару сухожиль та змушує актуатор відхилитися від подразника. Таким чином, вважають вчені, подібні платформи зможуть безпечно для себе працювати у незнайомих середовищах, не потребуючи складних алгоритмів планування руху чи значних масивів датчиків, які часто важко розмістити на м'яких роботах.
Особливістю свого контролера науковці вважають простоту та універсальність, яка дасть можливість пристосувати будь-якого м'якого робота до динамічно змінюваних середовищ.
Раніше ми розповідали, як філодендрону доручили махати мачете у роботизованій руці.





