Американські інженери розробили для дрона подібні до птахів ноги, з яким той навчився чіплятися за гілки та ловити вдесятеро важчий за себе вантаж. Дрон успішно повторює пташині прийоми для стабілізації тіла за приземлення. Щоб пристосуватися до зіткнень на високій швидкості, дві робоноги пасивно перетворюють енергію удару на силу для захоплення. Дрон на пташиних ніжках вчені представили у Science Robotics.
Успіх дрона порівняно із вміннями папуги-горобця еквадорського. Stanford / YouTube
Як приземляються птахи?
Пташиним лапам доводиться стикатися з широким спектром поверхонь — від гілок різного розміру та стовбурів дерев, на які доводиться сідати вертикально, до різноманітної здобичі, яку часто доводиться ловити на льоту. Втім, все це вдається їм із дивовижною легкістю, що привернуло увагу як біологів, так і інженерів. Вони досі досліджують особливості біомеханіки пташиної поведінки при зльоті та приземленні, та дійшли висновку, що вся справа у стратегії управління рухом тіла, заснованій на часі до контакту з поверхнею і швидкості птаха.
Так відомо, що птахи під час приземлення підтримують постійне значення цього параметра, при наближенні витягують ноги і ступні, а вмостившись, нахиляють тіло вгору. Після контакту із поверхнею ноги поглинають всю інерцію птаха та справляються із непередбачуваними поверхнями, обертаючи та стискаючи їх пальцями ніг. Контакт забезпечується завдяки об'єднанню передбачуваних птахом сил тертя подушечок пальців ніг та пазурів, які шукають елементи поверхні, за які можна зачепитися. І врешті птахи успішно балансують на жердинці і за необхідності коригують своє положення.
Внутрішньо весь цей процес опосередковується м'язами через сухожилля. І вважається, що птахи мають спеціальні виступаючі елементи вздовж частини сухожилля, що проходить через пальці ніг, — вони допомагають ефективно стискати пальці.
До чого дрону пташині ноги?
Порівняно з птахами, дрони хоч і вміють літати, але роблять це набагато менш ефективно та рівно стільки, на скільки їм вистачить заряду акумулятора. І тому хоч вони й вважаються ідеальними кандидатами для дистанційного дослідження складних місцевостей та здатні навіть підлітати до палаючих будівель і гасити пожежі, їхня нездатність тягати вантажі та довго літати сильно обмежує їхні можливості.
І важливо відзначити, що на відміну від дронів, яких у принципі привчили приземлятися і на майже вертикальні, нерівні або циліндричні поверхні, та навіть ловити запущені в них предмети, птахи все ж частіше користуються динамічно контрольованими зіткненнями, а не спланованими повільними приземленнями.
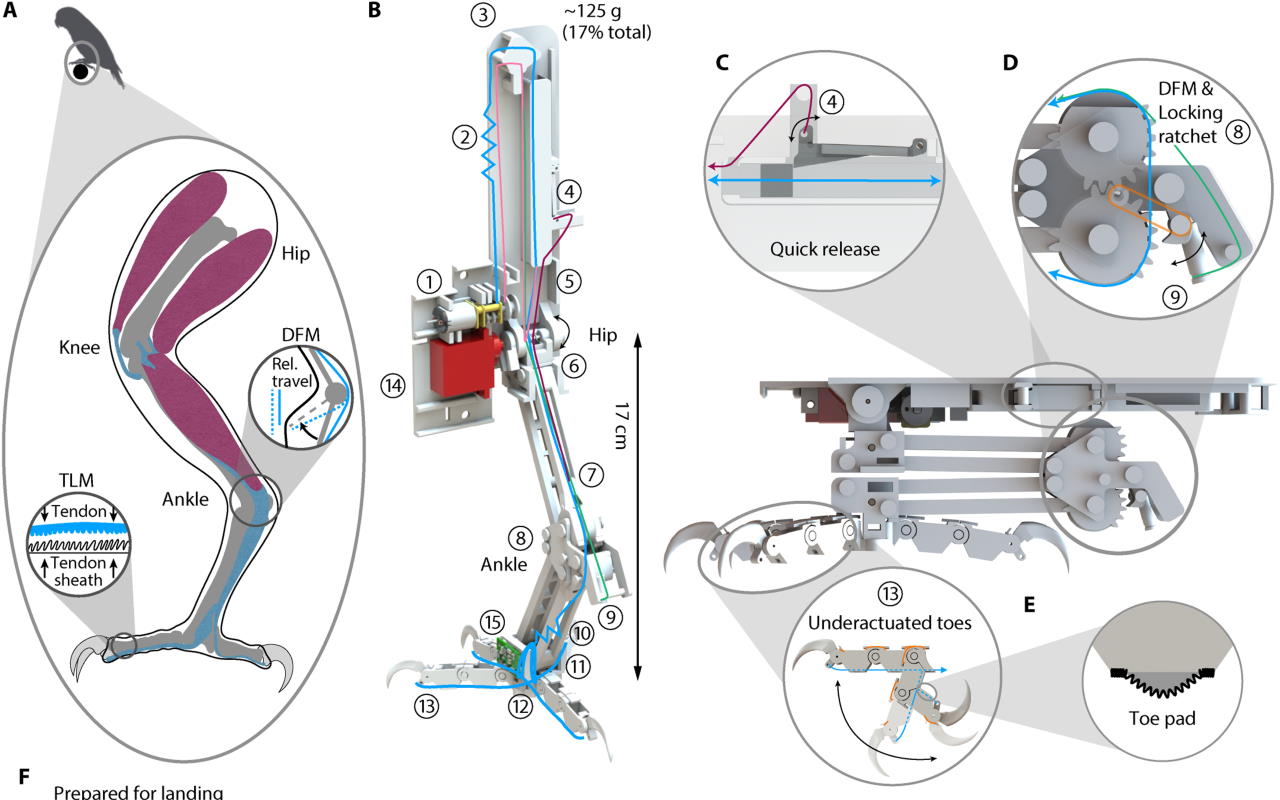
Натхнена сапсаном конструкція пташиних лап для дрона. W. R. T. Roderick et al. / Science Robotics, 2021
Компроміси, на які йдуть птахи, та на які доведеться йти дронам, щоб у польоті успішно приземлитися, визначаються умовами для контакту, з якими вони повинні впоратися при приземленні. Тобто вони весь час обирають поведінку, орієнтуючись на динаміку польоту. Наприклад, надто висока швидкість приземлення може призвести до травми птаха (а відповідно і дрона). Втім, з іншого боку, нижчі швидкості призводять до нижчої продуктивності польотів (буквально запізнень), а за тим підвищених витрат аеродинамічної енергії для повільного польоту. Дрону же повільні польоти можуть коштувати спричинених поривами вітру помилок при приземленні.
Крім того, жоден з відомих дронів не контролює своє положення для встановлення рівноваги після посадки, що є ключовим фактором успіху для закріплення на якійсь поверхні. У результаті жоден з них не наближається до універсальності, яку демонструють птахи при динамічному зіткненні та надійному захопленні великої кількості складних поверхонь.
Тому у своїй роботі, озброївшись дослідженнями біологів про можливості пташиних лап та здібностей у їхньому використанні, інженери Стенфордського університету розробили дрон, який поставили на дві пташині ніжки, з якими він зможе чіплятися за гілки та хапати кинуті в нього предмети.
Як приробити дрону ніжки?
Свій 500-грамовий коптер вчені наділили «натхненим природою стереотипним повітряним захопленням» або SNAG (stereotyped nature-inspired aerial grasper) — двома кінцівками, які за механізмом та за розміром нагадують пташині (а саме сапсана), а також алгоритмами корекції положення для пасивної та активної поведінки при приземленні на різноманітних сідалах. Так він поглинає енергію удару, щоб урівноважити різницю імпульсів між кінцівками та поверхнею, а під час посадки SNAG також балансує для стабілізації та може безпечно відірватися від поверхні для зльоту.
Stanford / YouTube
Ноги робота включають два ключові внутрішні механізми, присутні у багатьох пташиних лапах, які, як передбачається, забезпечують успіх захоплення: згинальний механізм і механізм фіксації сухожилля. Конструкція кінцівок складається із надрукованих на 3D-принтері сегментів. Жорсткі структури лап і пальців ніг птахів складаються з кісток і хрящів, пов'язаних між собою зв'язками і м'язами через сухожильні сполуки. Тому жорсткі конструкції робота аналогічно зроблені з твердого пластику, а захоплення здійснюється за допомогою тросів з пружинами, що послідовно приводяться в дію одним двигуном на кожну ніжку.
Оскільки стегна у пташок завжди притиснені до їхнього тіла під час приземлення та ловлі здобичі, конструкція ніг робота копіює лише ділянку від коліна до ступні. Серводвигун конструкції орієнтує ніжки та врівноважує центр тяжіння дрона під час сидіння. Другий механізм використовує накопичену пружинами енергію, яку випускає при ударі дрона об предмет. Так він посилює згинання пальців, а вже після стискання, механізм фіксації натягує сухожилля і фіксує положення ноги. Акселерометр забезпечує балансування та дає пристосуватися до поверхні за 50 мілісекунд. У стопах також розташовані електродвигуни, щоб контролювати їхнє положення.
Stanford / YouTube
Кожна нога важить близько 50 грамів або 6,7 відсотка від маси всього квадрокоптера в польоті. Це аналогічно розподілу мас у тілі багатьох птахів. Також, подібно до птахів, ніжки SNAG мають суглобові пальці, що рухаються сухожиллями-тросами. На пальцях є подушечки, які створюють тертя, і пазурі, які чіпляються за нерівності поверхні, що разом дозволяє SNAG надійно захоплювати складні поверхні. Пазурі також надруковані на 3D-принтері і мають ту саму форму та розмір, що й у сапсанів, яких взяли за приклад вчені. Щоб відтворити сапсанові вміння чіплятися за поверхні та за впольованих тварин, подушечки виготовили з гуми, яка деформується і забезпечує кращий контакт. Згідно з експериментами, його достатньо, щоб закріпити дрон, не зважаючи на бруд, лишайник, мох і вологу, які зазвичай зустрічаються на деревах у лісах.
Як політав дрон?
Модифікований ніжками дрон пройшов два типи випробувань з інженерами. Спершу ті запускали його за допомогою пускового механізму з рейок і резинки на сідала різних діаметрів. У цих експериментах вчені зосередилися на стратегіях балансування, швидкості приземлення та особливостях динаміки їхньої конструкції. А успіх дрона інженери визначали залежно від контексту. Наприклад, деякі птахи і кажани можуть сідати на сідало догори ногами і головою донизу. З'ясувалося, що і дрон так вміє, розгойдуючись під гілкою, як кажан.
Однак метою була все ж подібне сапсанам сидіння, тож дрону зараховували лише приземлення, за якого його центр мас залишався вище центру сідала, як у більшості птахів. Інженери випробували робота на трьох різних діаметрах сідал — зі SNAG він може приземлитися на будь-який, охоплюючи його повністю, або чіпляючись кігтями. А оскільки сидіння не надто відрізняється від ловлі, дрону ще і підкидали різні предмети, які він хапав, так само як сапсани свою здобич, причому незалежно від розміру і ваги — дрон впорався і з вагою, у десять разів більшою за себе.

Stanford / YouTube
Затим вчені, аби продемонструвати, як можна використовувати SNAG, щоб коптери, наприклад, могли стежити за навколишнім середовищем з гілки та при цьому не витрачати зайвої енергії на втримання у польоті, протестували дрон у лісі. Для цих випробувань пілот керував ним вручну і успішно садив дрон на ялині. Перебуваючи на місці, коптер зі SNAG може приносити будь-які дані, залежно від того, якими пристроями його наділити. Загалом дрон пройшов близько 190 випробувань, в яких показав, що здатний схопитися за гілку або інший об'єкт за 30-50 мілісекунд.
Також раніше ми вже розповідали про дрон, якого також наділили ніжками, щоб той чіплявся за гілки і відпочивав. Однак для їхньої конструкції інженерам не довелося вимірювати параметри ніжок сапсанів. Також закріпитися на поверхні для відпочинку коптерам допомагають липкі стрічки — з ними він може посидіти і на стіні. А дрон з м'якими ніжками та 16 сухожиллями не зупиняючись вхопив вантаж та полетів далі.




