Американські інженери розробили систему балансування, яка допоможе чотириногому роботу стати достатньо вправним, аби пройтися вузькою жердиною. Покращити координацію рухів робота допомогло реакційне колесо, яке контролювало кутовий момент робота при пересуванні. Подібні механізми використовують для орієнтації у космічних апаратах. Про свою розробку науковці розповіли на конференції ICRA.
Робот крокує по жердині з новим пристроєм на спині. CMUComputerScience / Youtube
Навіщо роботу балансувати на колоді?
Коли відчуєте, що втрачаєте рівновагу, можна почати махати рухами, аби таким чином зменшити кутовий момент і відновити баланс. Подібно роблять і, наприклад, гепарди використовуючи свій хвіст. Однак, такої можливості контролювати рівновагу позбавлені чотириногі роботи, які зазвичай швидко втрачають рівновагу, якщо не можуть стоять на всіх своїх кінцівках. Тому велика кількість завдань, як-от пересування складною місцевістю, для таких роботів недоступні. Аби виправити це, команда інженерів з університету Карнегі-Меллон розробила для свого чотириногого робота спеціальний модуль, який допоможе тримати рівновагу навіть якщо роботу доведеться балансувати на тонкій колоді.
Як втримати баланс?
Свою ідею науковці позичили у космічних апаратів, для орієнтації та стабілізації яких використовують реакційні колеса (reaction wheel). Така установка здатна змусити апарат, якщо той змінить швидкість обертання, пропорційно обертатися у протилежну сторону за рахунок збереження кутового моменту. По суті роботи механізм нагадує маховик, який може накопичувати кінетичну енергію, яку можна використати для корекції положення апарата.
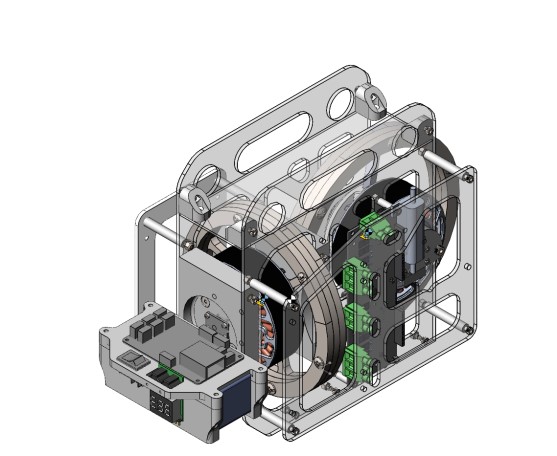
Конструкція стабілізаційного модуля для робота, що складається з двох синхронних двигунів з магнітами, які приводять у рух два маховики, які коригуватимуть положення робота по крену і тангажу. Chi-Yen Lee et al., 2023
Для свого чотириногого робота науковці розробили прототип реакційного колеса який допоможе йому вирівнювати положення вздовж поперечної осі і повздовжньої. Прототип пристрою являє собою компактний модуль вагою у 4,3 кілограма, що можна розмістити на спині робота. Невеликий двигун приводить реакційне колесо в дію, що генерує кутовий момент, який допоможе компенсувати його для робота під час втрати рівноваги. При цьому неважливо, на який бік завалюватиметься робот, адже модуль має автоматично компенсувати будь-які зміни балансу, оцінюючи положення центру мас.
Чим модуль допоміг роботу?
У комп'ютерному моделюванні інженерам вдалося навіть змусити чотириногого робота приземлитися прямо на ноги завдяки роботі реакційного колеса. В експериментах зі справжнім роботом скидати його з висоти не ризикнули, але натомість змусили пройти жердиною шириною у всього 6 сантиметрів. Робот подолав нею три метри та навіть встояв, коли його намагались штовхнути. Пристрій розробники називають універсальним, тому використовувати його зможе будь-який чотириногий робот. Так вчені сподіваються розширити можливості робособак, аби вони могли виконувати більше корисних завдань.
CMUComputerScience / Youtube
Встояти на чотирьох ногах
🦿Китайські інженери навчили чотириногого робота ходити на двох, аби звільнити решту кінцівок, наприклад, для відкривання дверей
🐈Також інженери пропонували і наділяти чотириногих роботів хвостом, як у котів, аби допомогти їм тримати рівновагу
🏋🏽♀️А чотириногий робот Unitree витримав на своїй спині людину вагою більше 100 кілограмів та покатав її





