Японські інженери відтворили анатомічні особливості страусової шиї у своєму роботизованому маніпуляторі, щоб зробити його більш гнучким і вправним. У своєму роботі вчені точно відтворили м'язи і сухожилля справжнього птаха за допомогою 3D-принтера. Інженери сподіваються, що їхнє дослідження посприяє розробці більш вправних робоманіпуляторів. Робострауса представили у IEEE Robotics and Automation Letters.
Демонстрація руху робота. Kazashi Nakano et al. / IEEE Robotics and Automation Letters, 2023
Чому інженери вподобали страусів?
Роботизовані маніпулятори сьогодні існують у найрізноманітніших конструкціях, залежно від задач, для яких їх створюють. Часто інженери звертаються за готовими конструкційними рішеннями до тварин. Наприклад, жирафів, будова шиї у яких завдяки системі хребців, сухожилля та м'язів, дозволяє бути одночасно гнучкою, але сильною і витривалою.
Для свого маніпулятора інженери з Університету Токіо спільно з колегами вирішили підгледіти конструкцію у страусів. Їхня шия також відрізняється одночасною гнучкістю та міцністю, а майже метрова довжина подібна до розмірів типових маніпуляторів, тому інженери не мали додатково шукати способів масштабувати будову тіла тварини.
Вченим вдалося скопіювати будову шиї страуса?
Для свого дослідження інженери детально вивчили будову шиї страуса, відтворивши у моделі мережу сухожилків, м'язів і хребців. За допомогою 3D-принтера вони надрукували 17 хребців, які поєднали гумовими стрічками та дротами, що імітували м'язи та зв'язки. Отриманого робота вчені назвали RobOstrich («Робостраус»). У рух конструкцію приводив електродвигун, що натягував «зв'язки».
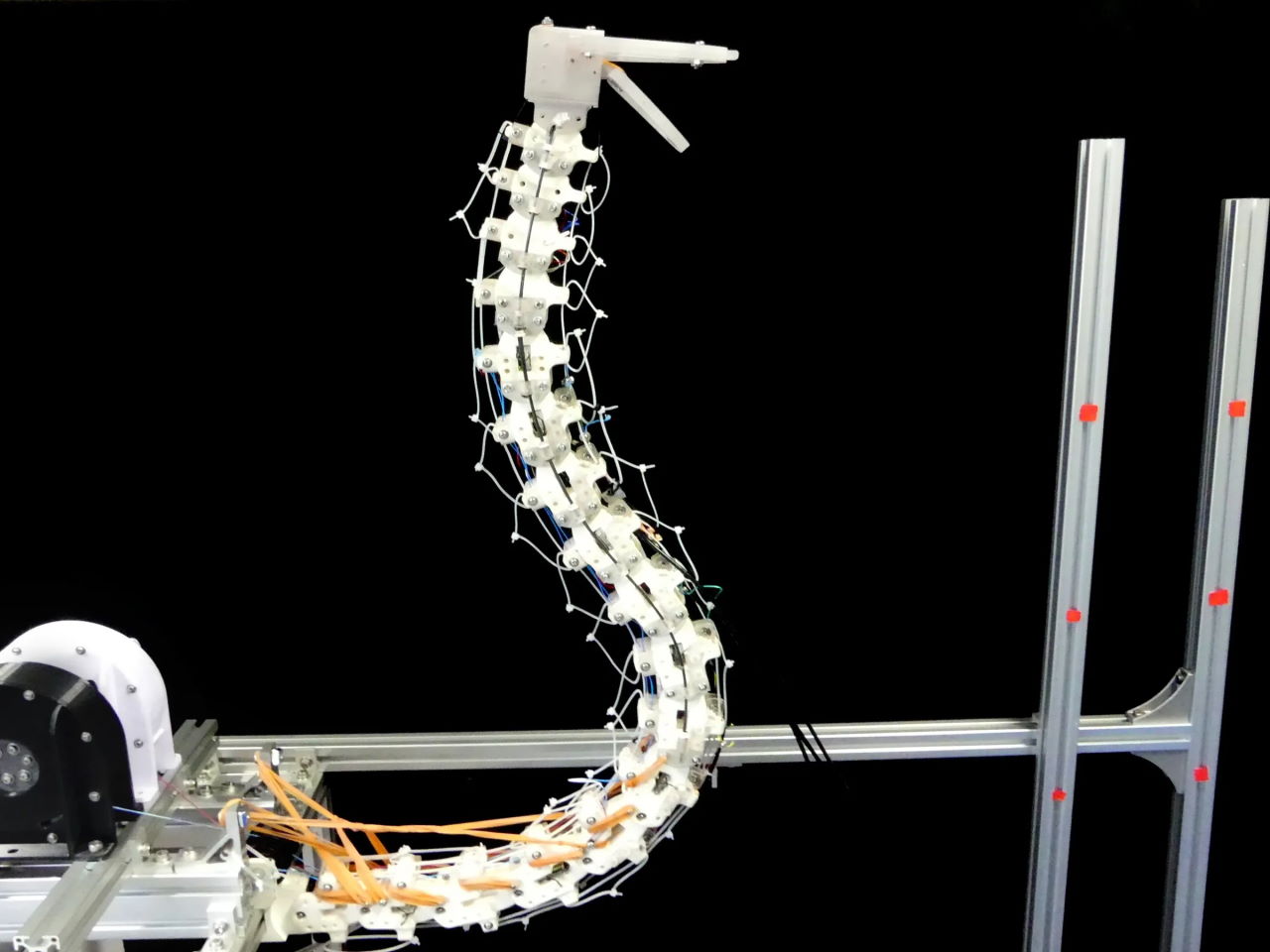
Вигляд RobOstrich. Kazashi Nakano et al. / IEEE Robotics and Automation Letters, 2023
Виявилося, що патерни руху RobOstrich були подібні до руху справжніх страусів, хоча роботизована версія і могла рухатися лише вниз-вверх. У майбутньому вчені планують зробити для RobOstrich кращу систему керування, яка дозволить так само вправно рухатися і з боку в бік.
Страуси не вперше надихають інженерів. Наприклад, робот Кессі здатна пробігти стометрівку менш ніж за 25 секунд на своїх схожих на страусові ніжках.