Японські інженери у співпраці із зооанатомами вперше відтворили шию жирафа з пневматичних штучних м'язів та надрукованих на 3D-принтері деталей. Поки робота має дослідницький характер і має лише допомогти знайти способи перенести анатомію справжньої тварини на техніку, однак роботизована шия вже вміє рухатися подібно своєму прикладу та навіть адаптуватися до прикладеної сили (прикладеної руками інженерів сили). Цей прототип ще далекий від всього, що вміють живі жирафи, однак інженери планують збільшувати його гнучкість і витривалість. Стаття опублікована у IEEE Robotics and Automation Letters.

Atsuhiko Niikura et al. / IEEE Spectrum
Навіщо вченим робот-жираф?
Жирафи є володарями найдовших ший на планеті. І навіть попри довжину у два метри і вагу від 100 до 150 кілограмів, вони мають надзвичайні механічні характеристики з точки зору інженерів. Мало того, що такі масивні шиї підтримують не менш масивний 30-кілограмовий череп, так жирафи ще і використовують їх у якості зброї та активно б'ють ними один одного. Це вказує не лише на їхню силу і гнучкість, а і високу динамічну пристосованість, чого роботам часто не вистачає.
Досі вчені не працювали з машинами і роботами, які б могли повторити характеристики шиї жираф. І якщо два промислові крани спробують зійтися у битві подібно тому, як на відео нижче, то доволі легко уявити собі катастрофічні наслідки такого зближення. Звичайним жорстким роботам просто ніде взяти таку одночасну потужність і гнучкість, хоча міцність, адаптовність та вміння виконувати обережні рухи знадобилися б їм у більшості завдань від будівництва до роботи у зонах стихійних лих.
Nat Geo WILD / YouTube
Автори цієї роботи з Токійського технологічного інституту навіть створили діаграму, де розподілили жорстких, напівм'яких і м'яких роботів залежно від їхньої гнучкості та потужності (діапазону руху і сили). І попри широкий асортимент натхнених у тому числі природою роботів, жоден не дістався рівня шиї жираф або хобота слонів. Крім того, наслідування, наприклад, восьминогів чи слонячих хоботів, все ж не зможе забезпечити значної потужності, адже, на відміну, від цих прикладів, жирафи послуговуються не лише м'язами, а і скелетом.
Тому японські інженери об'єдналися з фахівцями з анатомії жирафів та дослідниками штучних м'язів і взялися за створення великого робота, якому гнучкість і силу забезпечать підказки з будови шиї цих великих тварин.
Як побудувати роботизовану жирафу?
З точки зору робототехніки, анатомія шиї жираф виглядає як скелетний механізм з великою кількістю ступенів свободи, які йому забезпечують череп, сім шийних хребців та один грудний. Причому останній не прикріплений до ребер подібно іншим ссавцям, а тому жирафи можуть обертати ним вгору-вниз та вліво-вправо. Рухомий суглоб між першим і другим грудними хребцями є головною характеристикою будови шиї жирафів, яка відрізняє їх від інших. Тобто для інженерів шия жирафа це механізм з послідовними ланками і 18 ступенями свободи, опосередкованими складною системою м'язів.
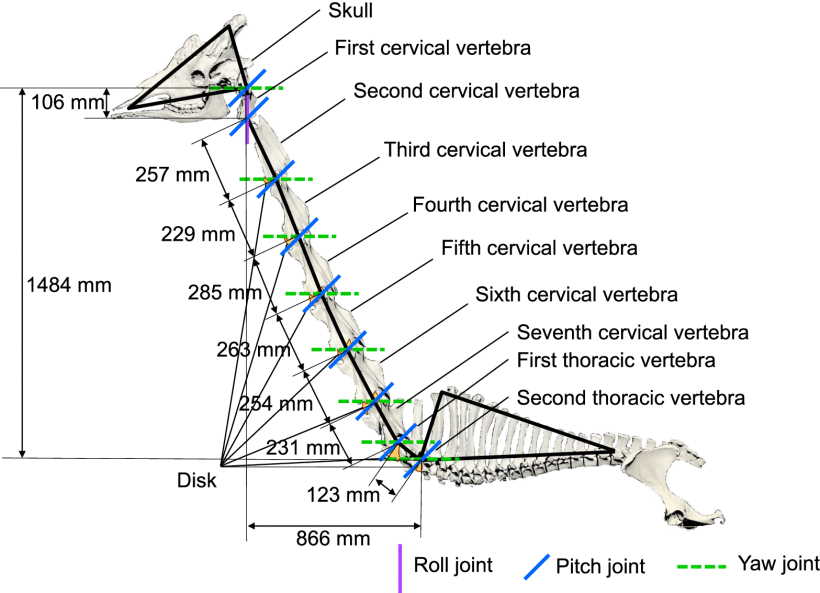
Atsuhiko Niikura et al. / IEEE Robotics and Automation Letters., 2022
Озброївшись отриманими від зооанатомів даними інженери розробили роботизований аналог довжиною у метр (що, до слова, вдвічі менше за реальних тварин). Він складається з надрукованих на 3D-принтері черепа і хребців-точних копій таких у жирафів, а також системи штучних м'язів. З'єднання між хребцями імітували еластичними гумовими дисками. Все це забезпечило роботу 14 ступенів свободи, а також можливість підняти три кілограми ваги.
Atsuhiko Niikura et al. / IEEE Robotics and Automation Letters., 2022
Експериментальні результати вказують, що вченим вдалося добитися від роботизованого аналога механізмів, які можуть забезпечити потужність і гнучкість подібно таким у жирафів. Результати роботи підтверджують координацію між м'язами і адаптивність до прикладеної інженерами до робота зовнішньої сили (вони били його руками). Роботу вдалося також відтворити компенсацію сил, перерозподіл навантаження та взаємодію кількох м'язів. Поки робот носить ім'я «Робот з шиєю жирафа №1», але у майбутньому вчені планують змінити підхід до приведення його у дію з пневматичного на гідравлічний, що має покращити механічні характеристики робота.

Atsuhiko Niikura et al. / IEEE Robotics and Automation Letters., 2022
Враховуючи, що еволюція створювала всі кращі інженерні рішення з випередженням на чотири мільярди років, вченим тільки і залишається, що шукати розв'язків своїм задачам у живій природі. Так ми вже розповідали про безліч орнітоптерів, які імітують вміння комах літати і орієнтуватися у просторі. А також про м'яких роботів, які копіюють якщо не хоботи слонів, то обов'язково восьминогів чи скатів і риб з їхніми плавниками.





