Каліфорнійські інженери показали прототип роборуки, яка перетягуватиме роботів складною місцевістю. Механізм схожий на вимірювальну рулетку, що витягується та вигинається. За допомогою крюка робот зможе знайти собі опору та обійти перешкоду. На думку інженерів, це знадобиться для роботи у лісах і печерах. У відео, що представляє новий маніпулятор, вони продемонстрували, як він може підтягнути робота на драбині.
RoMeLa / YouTube
Куди така рука витягне робота?
Подовжувані кінцівки могли б дуже знадобитися роботам, які мають працювати у складних умовах, як-от вузькі тунелі, печери чи інші складні для прямого пересування місцевості. Висувні механізми дозволять забезпечити значну досяжність за компактних розмірів, тому у своїй роботі інженери лабораторії RoMeLa з Каліфорнійського університету у Лос-Анджелесі створили роботизований маніпулятор, який має такий механізм.
EEMMMa (Elastic Extending Mechanism for Mobility and Manipulation), подібно звичайній вимірювальній рулетці, складається з стрічкової пружини, яка є, власне, роборукою, основного корпусу з моторизованою котушкою, а також підсистеми керування натягом та електронікою. Для того, щоб робот з його допомогою міг пересуватися, на кінець маніпулятора науковці пропонують розмістити шипи, які фіксуватимуть роборуку.

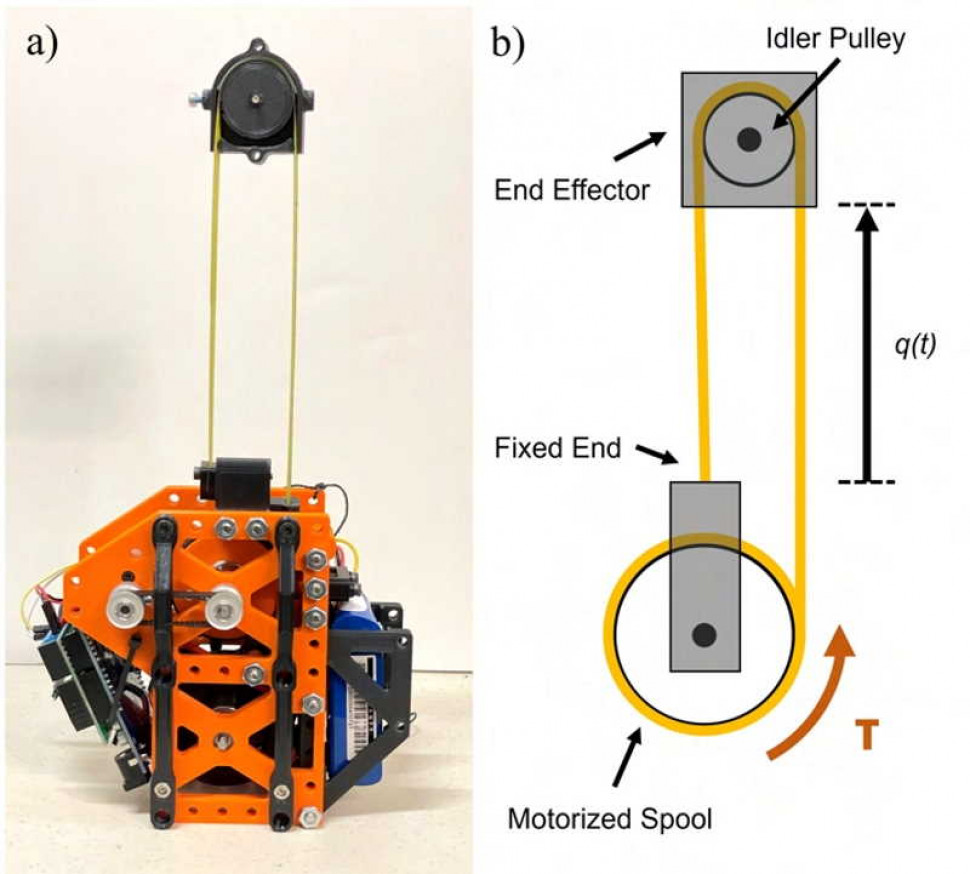
Перший прототип EEMMMa вчені вже випробували. Вона забезпечує підтягування, закріпившись, наприклад, на сходинці драбини, зі швидкістю 19 метрів на секунду. У майбутньому вчені планують створити робота з трьома-чотирма такими кінцівками, які допоможуть йому не лише пересуватися, а і, наприклад, розміщувати камери чи інше обладнання у складнодоступних місцях. Як пишуть дослідники, трьох точок кріплення достатньо для безпечного руху у неструктурованих місцевостях з перепадами висоти чи нестабільною поверхнею.
RoMeLa / YouTube
Раніше ми розповідали про подібний механізм, який розробили науковці для NASA. Робот з висувними руками також зможе лазити печерами або збирати зразки.





