Розроблений у Массачусетському технологічному інституті чотириногий робот Mini Cheetah або «мінігепард» встановив власний рекорд зі швидкості бігу та розвинув швидкість до 3,9 метра на секунду. Завдяки новій навчальній стратегії алгоритми допомогли робогепарду побігати складною місцевістю, наприклад, по гравію, а також розкрутитися на місці зі швидкістю до 5,7 радіана на секунду, причому навіть на кризі. Статтю дослідники обіцяють опублікувати згодом, а поки відомі деталі проєкту доступні на сайті проєкту.
MIT CSAIL
Як бігають чотириногі роботи?
Найвідомішими чотириногими роботами, які перші спадають на думку, є роботи компанії Boston Dynamics, які можуть не лише встояти навіть якщо їх штовхають ногами, а і синхронно трусять задніми частинами тіла під музику. Навички чотириногих роботів досягли значного прогресу завдяки новітнім алгоритмам ходи, бігу і балансування — словом, інженери добре навчили свої розробки перебирати ногами.
Так ми розповідали про чотириногих, які самостійно справляються з бігом по намащеній олією підлозі та гуляють тротуарами, уникаючи людей, та навіть вчаться вигадувати нові трюки.
Mini Cheetah або «мінігепардом» кілька років займаються інженери Массачусетського технологічного інституту з метою створити робота, який зможе володіти всіма цими навичками та при цьому не потребувати візуальних даних — камер, лідарів та інших видів «зору» для роботів. І цього разу дослідники поділилися його новими результатами — рекордом зі швидкості бігу.

MITCSAIL / YouTube
Робот-гепард тільки навчився бігати?
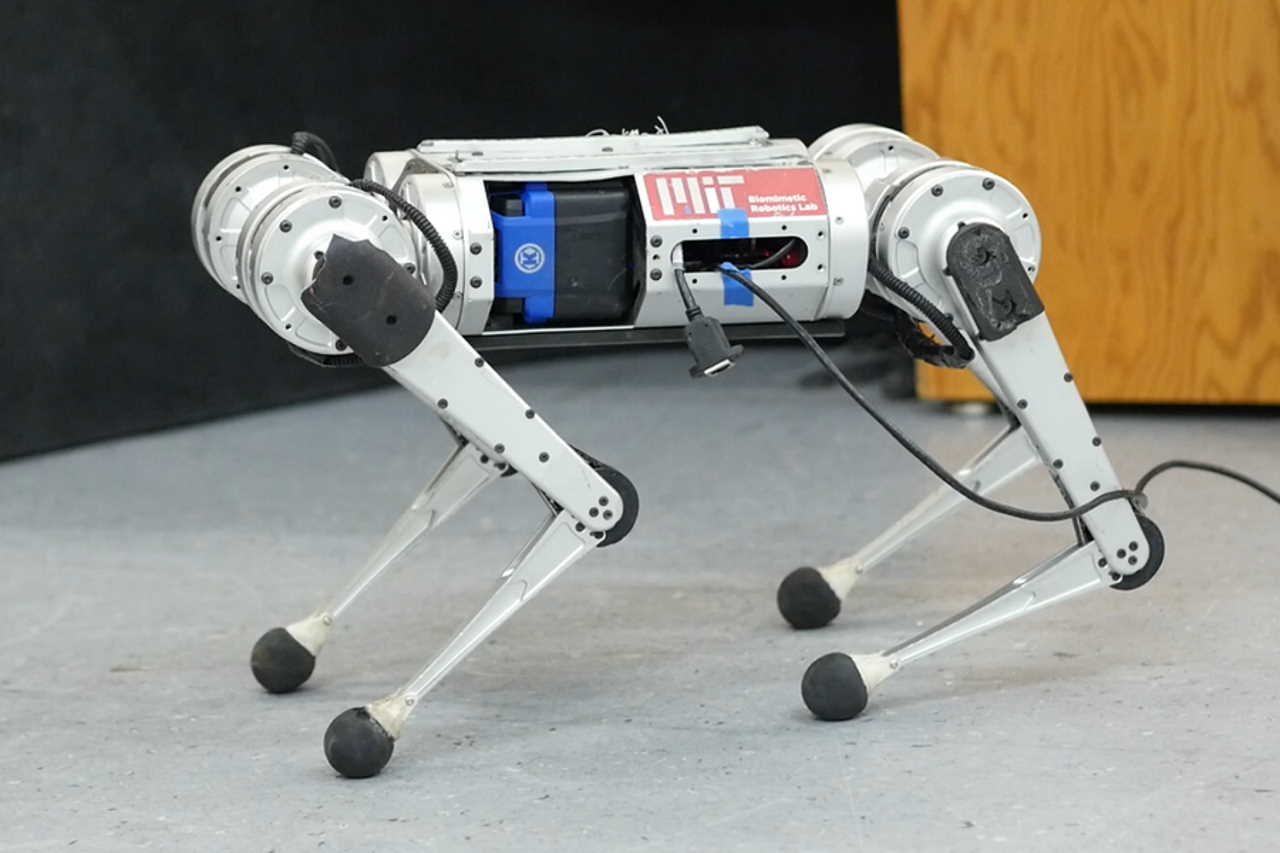
Mini Cheetah — це класичний чотириногий робот, керований електромоторами, який слугує інженерам MIT для розробки та налагодження нових алгоритмів. З огляду на статтю про Mini Cheetah під назвою, з якою у 2019 році розробники виступили на конференції ICRA, цей чотириногий є «невеликим і недорогим, але потужним і механічно надійним чотирилапим роботом, призначеним для розробки систем керування для роботів з кінцівками».
За словами інженерів, всі чотири кінцівки Mini Cheetah спроєктовані так, щоб максимально збільшити діапазон рухів за мінімальної їхньої маси. Також їхня конструкція дає роботу змогу рухати кінцівками як вздовж тіла, так і повертатися вбік. Цей діапазон рухів дозволить роботу рухатися однаково ефективно і вперед, і назад, повертати своє тіло на 90 градусів, щоб проходити через вузькі проходи, та навіть вилазити на перешкоди, що набагато перевищують довжину його ніг.
Зріст Mini Cheetah складає 0,3 метра, а важить робогепард близько 9 кілограмів. Згідно з цією статтею, робот може стрибати сальто назад з положення стоячи, бігати риссю, стрибати та розвивати швидкість до 2,45 метра на секунду. Цього разу алгоритми навчання з підкріпленням без використання моделей допомогла роботу навчитися бігати ще швидше — зі швидкістю до 3,9 метра на секунду.

MITCSAIL / YouTube
Чому бігати важче, ніж ходити?
Для роботів, яких планують відпускати працювати автономно, вирішальне значення має стратегія навчання, щоб вони могли ефективно використовувати свої динамічні обмеження. Спритні маневри, такі як біг чи різкі повороти, вимагають складної координації рухів та точної оцінки роботом свого положення. А самі високі швидкості вимагають використання максимальних можливостей робота, що ускладнює моделювання його динаміки, а отже і навчання. Ходьба є набагато простішою, адже повільно рухаючись, робот може і не помітити снігу, гальки або будь-яких інших перешкод, які ускладнять рух. Але якщо він працює на своїх максимальних потужностях, він має особливо спритно реагувати на зміни в навколишньому середовищі, наприклад, коли він стикається з льодом під час бігу травою.
І враховуючи таку важливу роль адаптації до зміни умов, вчені вважають, що заздалегідь створювати для роботів моделі поведінки недоцільно, а краще використовувати алгоритми, які працюватимуть без попередніх планів. Цього разу Mini Cheetah послуговувався лише своїми контролерами положення IMU, дані яких алгоритм мав швидко сприймати і використовувати для планування наступних кроків чотириногого робота.
MITCSAIL / YouTube
Так, з огляду на демонстрацію досягнень «мінігепарда», окрім спринту на швидкості 3,9 метра на секунду, Mini Cheetah здійснив ривок на 10 метрів на швидкості 3,4 метра на секунду на вулиці, заліз на гірку з гравію та втримався на ногах після того, як спіткнувся. Крім того, він зміг покрутитися навколо себе зі швидкістю 5,7 радіана на секунду, та повторив цей трюк з крутінням ще і на кризі.
MITCSAIL / YouTube
Mini Cheetah не вперше з'являється на nauka.ua. Ми вже розповідали, як цей робогепард зміг приземлитися на лапи подібно коту, падаючи з триметрової висоти. Для цього, щоправда, його довелося взути у наповнені монетами чоботи.