Китайські інженери розробили хвіст для чотириногого робота, щоб він міг безпечно приземлятися при падінні з висоти. Хвіст допоміг пережити роботу падіння з висоти у 1,85 метра, повертаючи чотириногого за потреби і забезпечуючи стабільне приземлення на ноги. Хвіст випробували на роботі Unitree A1, а своїми результатами інженери поділилися на конференції IEEE International Conference on Robotics and Automation.
Падіння робота без хвоста (зліва) і з ним. IEEE Spectrum / YouTube
Чому роботу допомагає саме хвіст?
Попри успіхи у пересуванні, чотириногі роботи досі не вміють безпечно приземлятися при падінні з висоти. Інженери працюють над розробкою для своїх роботів стратегій приземлення: наприклад, французькі вчені навчили робота Mini Cheetah приземлятися на ноги подібно до кота. Однак, нерівномірний розподіл навантаження при такому падінні загрожує руйнуванням.
Натомість дослідники з Китайського університету Гонконгу вирішили запозичити у котів не лише техніку приземлення, а і їхній хвіст.
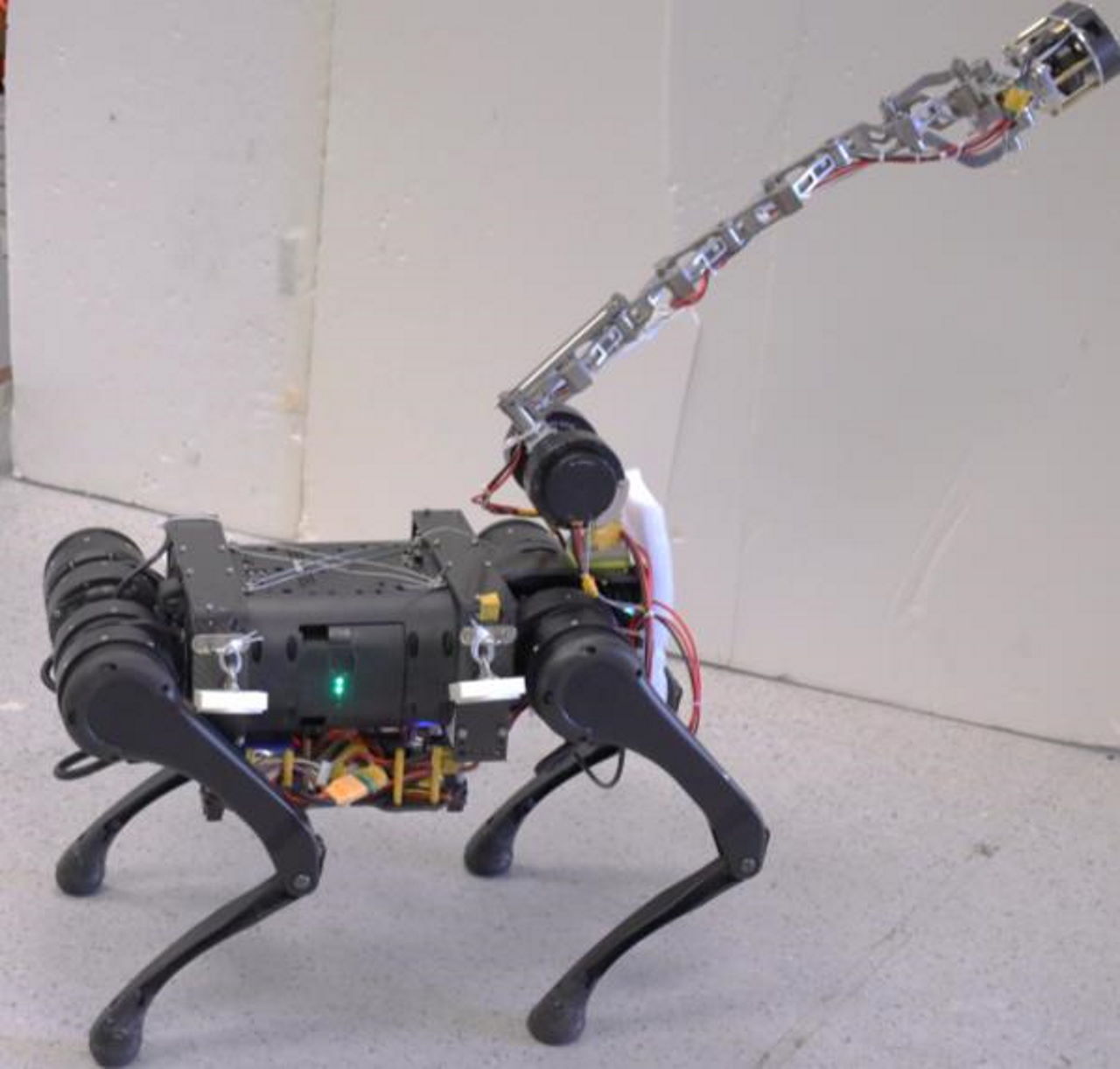
Робот Unitree A1 з хвостом, який розробили інженери. Yunxi Tang et al. / arXiv, 2022
Вчені розробили хвіст вагою у 2,3 кілограма, який може хитатися вгору-вниз, по сторонах та витягуватися у довжину. Ці три ступені свободи дали можливість чотириногому роботу Unitree A1 приземлитися на ноги при падінні з висоти у 1,85 метра. Хвіст допомагав Unitree A1 коригувати положення тіла, щоб навантаження при приземленні не зруйнувало його конструкцію.
IEEE Spectrum / YouTube
Раніше ми розповідали, як інженери випробували роботизований аналог хвоста гекона, щоб допомогти роботам приземлятися на вертикальні поверхні