Китайські інженери показали свій підхід до перетворення дрона з літального на наземний апарат. Всенаправлене колесо на дні квадрокоптера дозволяє економити енергію, що була б витрачена на переліт. При цьому, вченим вдалося створити універсальний контролер руху для апарата, що керує одночасно і польотом, і їздою. Розробку показали у журналі IEEE Robotics and Automation Letters.
Дрон їздить на колесі. Neng Pan et al. / IEEE Robotics and Automation Letters, 2023
Навіщо дрону колеса?
Ідея наділити дрони властивостями одночасно і літального, і наземного транспорту не нова. Таким інженери вбачають компроміс між енергоефективністю апарату та його всюдихідністю: витрачати енергію на переліт перешкод, але економити її, рухаючись по землі, де це можливо. Раніше ми розповідали про квадрокоптер, який повністю оточили колесом. Аби кататися, він має перевертатися у вертикальне положення, щоб стати на колесо, рухоме сервоприводом. У цій роботі інженери обійшлися без перевертання дрона — навчили його приземлятися на колесо та продовжувати рух, використовуючи свої ж гвинти.
Чим цей дрон відрізняється від інших?
Дрон, що отримав ім'я «Скайвокер» (Skywalker), має чотири гвинти, а також одне пасивне колесо, яке дозволить коптеру стати наземним. Аби покататися на землі, дрон так само має крутити гвинтами, однак з набагато меншою швидкістю, тож це економить йому до 75,2 відсотка енергії. Максимальна швидкість «Скайвокера» сягає п'яти метрів на секунду.

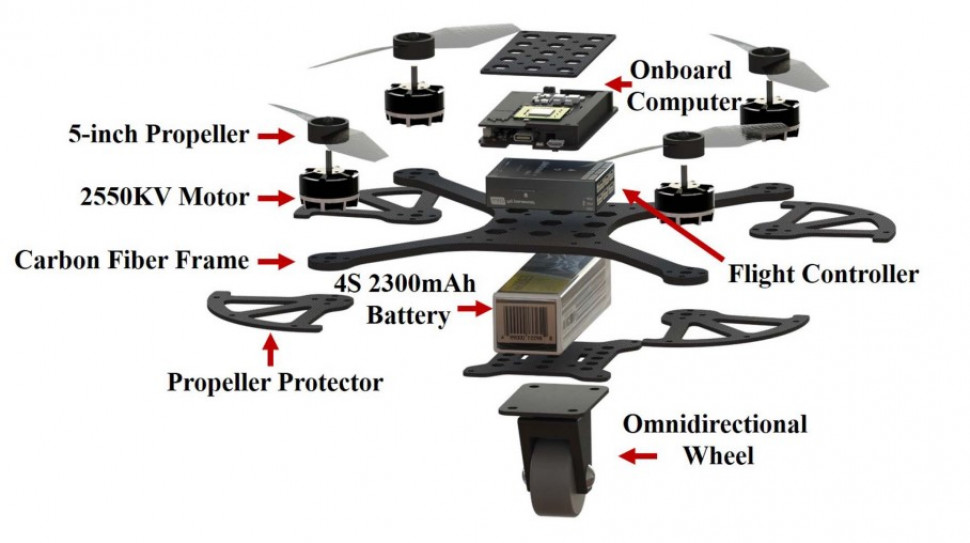
Головним здобутком розробників є єдина система відстеження і керування рухом. Дрон не має змінювати положення, аби перемикнутися з польоту на катання, а контролери руху скоригують траєкторію і у повітрі, і на землі. Щоб захистити гвинти від можливого пошкодження через приземлення, їх прикрили захисними рамами. Вся конструкція включно з модулем керування, батареєю, захисною рамою та освітленням, заважила 840 грамів. При цьому «Скайвокер» зможе підняти ще 2,7 кілограма корисного навантаження.





