Китайські інженери показали гібридний безпілотник, який може перемикатися між польотом та їздою. Політ забезпечує чотири гвинти, катання — єдине колесо с серводвигуном, а перевертатися дрону допомагає поворотний механізм. Свою розробку показали на конференції IROS. Присвячена роботі стаття доступна на arXiv.

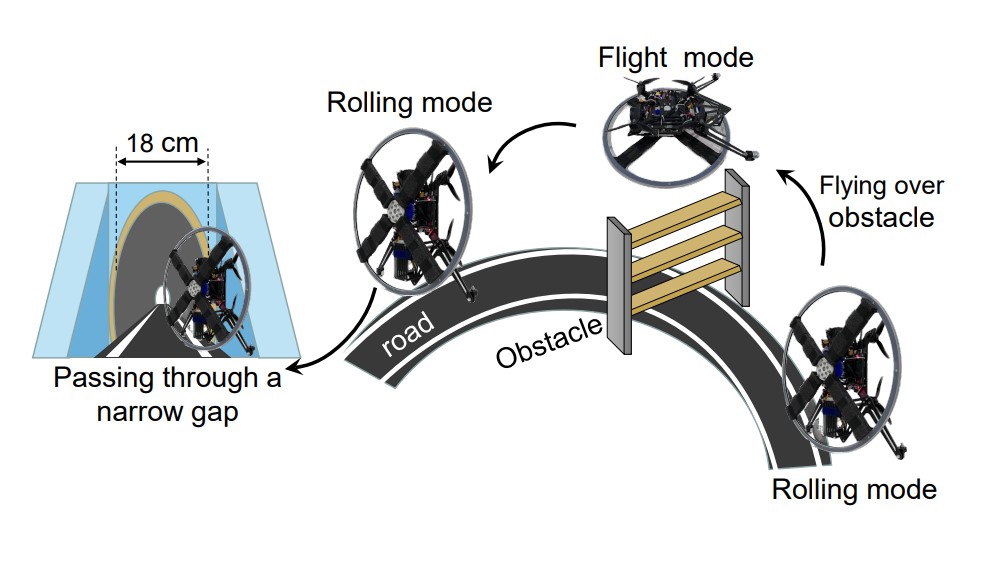
Конструкція робота. Zhi Zheng et al. / arXiv, 2023
Навіщо дрону літати?
Поки колісним роботам не вистачає всюдихідності, адже не всюди вони зможуть ефективно долати шлях, дрони, що перешкоди вміють перелітати, страждають від обмежень своїх акумуляторів, адже політ вимагає багато енергії. Серед різних підходів до адаптації роботів до складних умов роботи, дослідники Чжецзянського університету вирішили взяти все краще від різних видів роботів, та створили колісний квадрокоптер. Гібридний робот вміє і літати, і кататися, що дасть можливість бути маневровішим, але при цьому менш енерговитратним.
Концепція інженерів. Zhi Zheng et al. / arXiv, 2023
Як політав робот?
Основний корпус робота є асиметричною конструкцією з Х-подібною рамою і діаметром осі 22 сантиметри. Для їзди інженери забезпечили роботу чотириспицеве колесо діаметром 36 сантиметрів та серводвигун із шарнірами для врівноважування. Для польоту у робота є традиційні для квадрокоптерів гвинти.
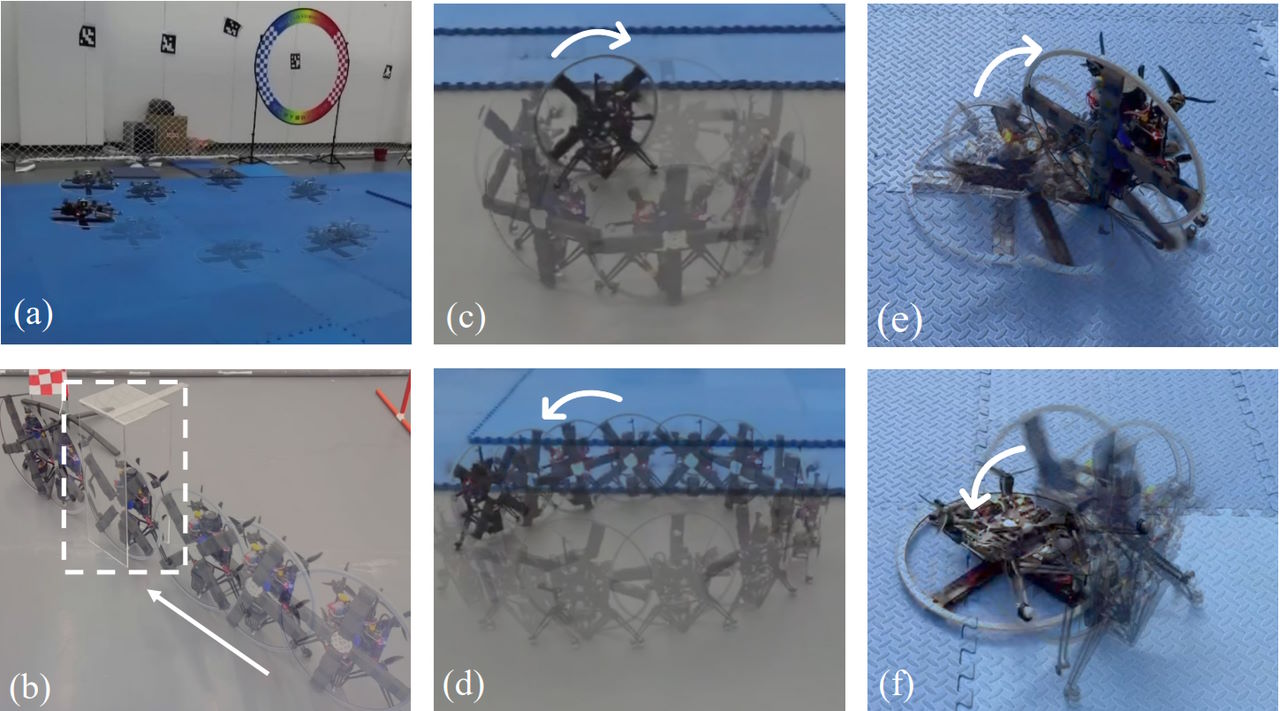
Зображення гібридного дрона під час польоту та катання в колесі. Zhi Zheng et al. / arXiv, 2023
Таким чином, дрон зміг однаково добре покататися, як і пролетіти під час експериментів. При цьому під час їзди він зміг подолати майже в 3,8 раза більшу відстань, а працювати приблизно в 42,2 раза довше, ніж під час польоту. У майбутніх роботах вчені планують поліпшити режим їзди, щоб він був більш плавним та стійким.
Раніше ми розповідали, як перетворити колісного робота на дрон інженерам допомогло оригамі. Нагрівання змінює форму основи робота, що дозволяє перекваліфіковуватись з колісного на летючого.





