Японський робот отримав м'які кінцівки, які скручуючись у форму троянди, дозволяють хапати м'які, крихкі та дрібні речі, як-от куряче яйце чи арахіс. М'які стінки захвату огортають предмет, а потім затискають «пелюстками», тому робот зможе брати предмети різної форми. Про розробку розповідає видання New Atlas.
Робот з новим захватом дістає яйце з миски з олією. Son Tien Bui et al. / Robotics: Science and Systems, 2023
Чому саме троянда?
Сьогодні існує велика кількість конструкційних рішень для роботів, які дозволяють їм взаємодіяти з предметами. Однак, інженери прагнуть створювати універсальні захвати, з якими робот зможе взаємодіяти з предметами різної ваги, форми та крихкості. Останнім часом популярним напрямком стала м'яка робототехніка, яка використовує у створенні роботів м'які і гнучкі матеріали, які значно піддатливіші за жорсткі конструкції. Цим скористалися інженери з Японського інституту науки і передових технологій та створили для свого робота м'який захват з еластомеру, який повторює форму троянди.
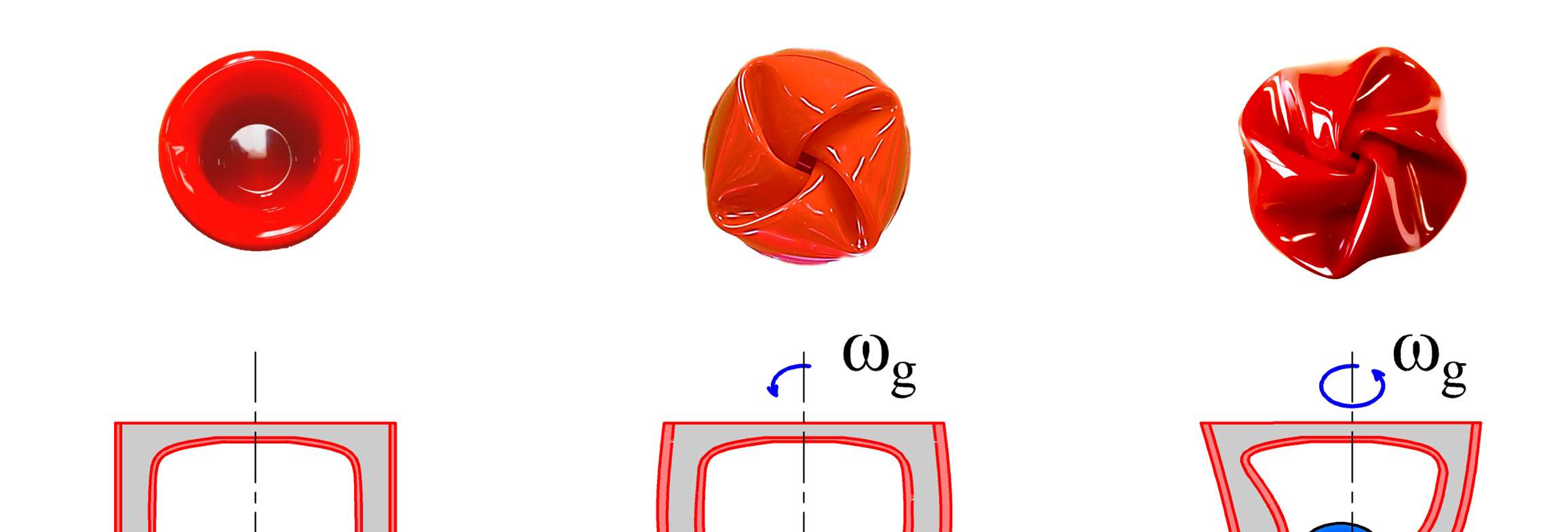
Скручування захвату. Son Tien Bui et al. / Robotics: Science and Systems, 2023
Троянди надихнули вчених тим, як змінюється форма бутона, коли квітка закривається і розкривається. Конструкція трояндоподібного захвату нескладна: воно складається з гнучкої воронки, яку закріпили на жорсткій основі. Обертаючись, основа змушує воронку скручуватися, і таким чином втримувати те, що потрапило всередину. 198-грамовий захват-троянда може втримати до 30 кілограмів ваги та акуратно маніпулює об'єктами різних розмірів, форм та матеріалів без будь-якого пошкодження. Захват витримав понад 400 тисяч циклів згортання-розгортання, а розробники сподіваються у майбутньому пристосувати свій захват для роботи під водою.
Випробування нового захвату. HO lab / YouTube
Раніше ми розповідали про натхненний морськими огірками м'який матеріал, з якого інженери створили захват для підводного робота. Таким захватом робот зможе підіймати найкрихкіші речі, не ушкоджуючи їх.





