Розробники робота, який пересувається, балансуючи на кулі, навантажили його речами загальною вагою у 21 кілограм. Щоб втриматися на «ногах», робот мав самостійно компенсовувати навантаження і балансувати навіть якщо воно було нерівномірним. Як йому це вдалося, вчені поділилися на своєму YouTube-каналі.
CMU Ballbot / YouTube
Що за робот?
Останніми роками динамічно стійкі (dynamically-stable) мобільні роботи стали привабливою альтернативою своїм статично стійкі (statically-stable) аналогам, які стоять на складних конструкціях. І на початку двотисячних серед таких роботів з'явився новий клас — кулеботи (ballbot). Замість ніг, коліс або гусениць вони використовують кулю, яка забезпечує стабільний контакт з землею та при цьому можливість розвернутися у всіх напрямках. До цього апелювали інженери університету Карнегі-Меллон та автори статті під назвою «Oдного вистачить!» (One is Enough!). На їхню думку, статично стійкі мобільні роботи для роботи поруч з людьми є еволюційним глухим кутом.
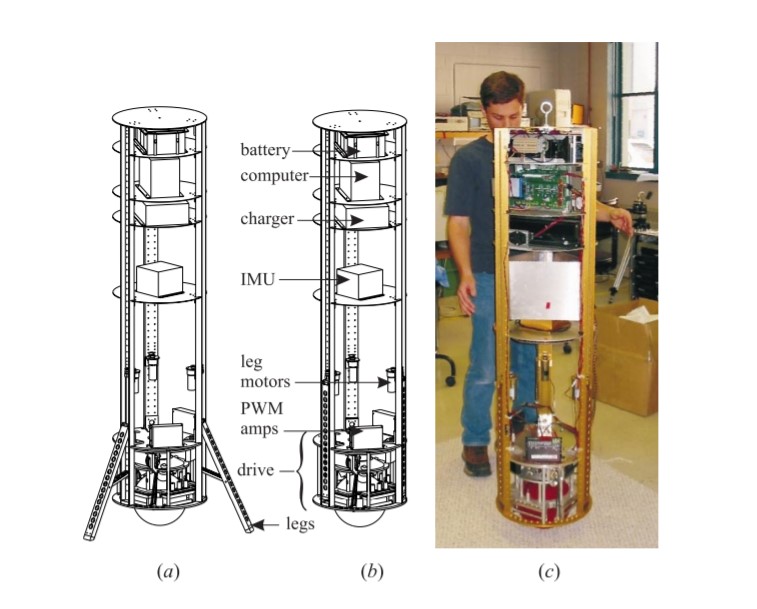
Tom Lauwers, George Kantor, and Ralph Hollis, 12th Int’l Symp. on Robotics Research, 2005
Так ідейні натхненники кулеботів реалізували свого власного і випробували на ньому різні стратегії руху та втримування рівноваги. Зрештою вони наділили його двома маніпуляторами і вручили пару склянок води, що вимагає чіткої координації верхньої і нижньої частини тіла, а також кінцівок. Щоб робот міг зберігати баланс, інженери наділили його контролерами імпульсу, які допомагають роботу координувати себе у просторі, орієнтуючись на імпульс тіла. Так він не зважаючи на наявність рук, які додають ступені свободи, та попри додаткове навантаження, зміг втриматися на своїй кулі.
Навіщо йому гантелі і гирі?
Мета контролера робота визначається з погляду бажаного для нього імпульсу, що дозволяє роботу, спираючись на дані про силу реакції опори, реалізовувати бажані значення лінійного та кутового моменту. Щоб випробувати свою стратегію керування роботом, вчені вирішили навантажити робота не просто склянками води, а купою різних предметів загальною вагою у 21 кілограм. Судячи з відео, робот доволі впевнено себе почувався, а на кожну додаткову гирю реагував майже так само, як би реагувала людина, взявши вагу — він дещо нахилявся у бік вантажу, але потім повертав собі рівновагу, покатуючись на кулі.
CMU Ballbot / YouTube
Інженери з роботами давно знаходяться у пошуках балансу: вчать жонглювати предметами, щоб мати універсальний алгоритм для утримування об'єктів, чи шукати точки опори, щоб якщо не перевернути світ, то принаймні втримати рівновагу на нерівних поверхнях.





