Пасивна роборука вхопила 14 різних за формою предметів завдяки алгоритму прогнозування помилок і зап'ястю, що керувало пальцями. Якщо речі починали вислизати з рук, алгоритми адаптували положення пальців, щоб втримати предмети міцніше. Своєю розробкою інженери поділилися у Advanced Intelligent Systems.
Роборука втримала комп'бтерну мишу в руках, хоча навчалася лише маніпулювати кулькою. Kieran Gilday et al. / Advanced Intelligent Systems, 2023
Чому інженери не зробили роборуці жорсткі пальці?
Брати до рук предмети різного розміру, форми, ваги і текстури для роботів задача набагато складніша, ніж для людей. Інженери працюють над різними підходами, які допоможуть роботизованим маніпуляторам вправлятися з предметами. Одним з таких є використання м'яких кінцівок, створених з гуми чи силікону. Вони можуть легко пристосовуватись до різних форм, тоді як традиційні жорсткі маніпулятори вимагають довгого часу навчання, щоб мати навички втримування різноманітних речей.
Надійне захоплення предметів вимагає двох компонентів: алгоритмів планування руху для захоплення та адаптації до предмета, якщо він за певними параметрами відрізняється від передбачених навчанням. У цій роботі інженери розробили алгоритм для м'якої і пасивної роборуки, який допоможе виявляти та усувати похибки адаптації до предмета ще до того, як це призведе до його втрати з рук.
Як роборука тримає речі?
Керується рука через зап'ястя, що регулює положення пальців за допомогою сухожилля. Ідея полягає в тому, що воложення кінцівки змінюється залежно від даних, які система отримує від 32 датчиків тиску, які відповідають за відчуття дотику. Вона аналізує дані та прогнозує можливі помилки при захопленні об'єктів, намагаючись створити траєкторію руху, яка допоможе помилок уникнути. У підсумку, навчена вправлятися зі звичайною кулькою роборука, змогла схопити 11 із 14 різних предметів, як-от комп'ютерна миша чи рулон плівки, які мали схожий на навчальну сферу розмір.
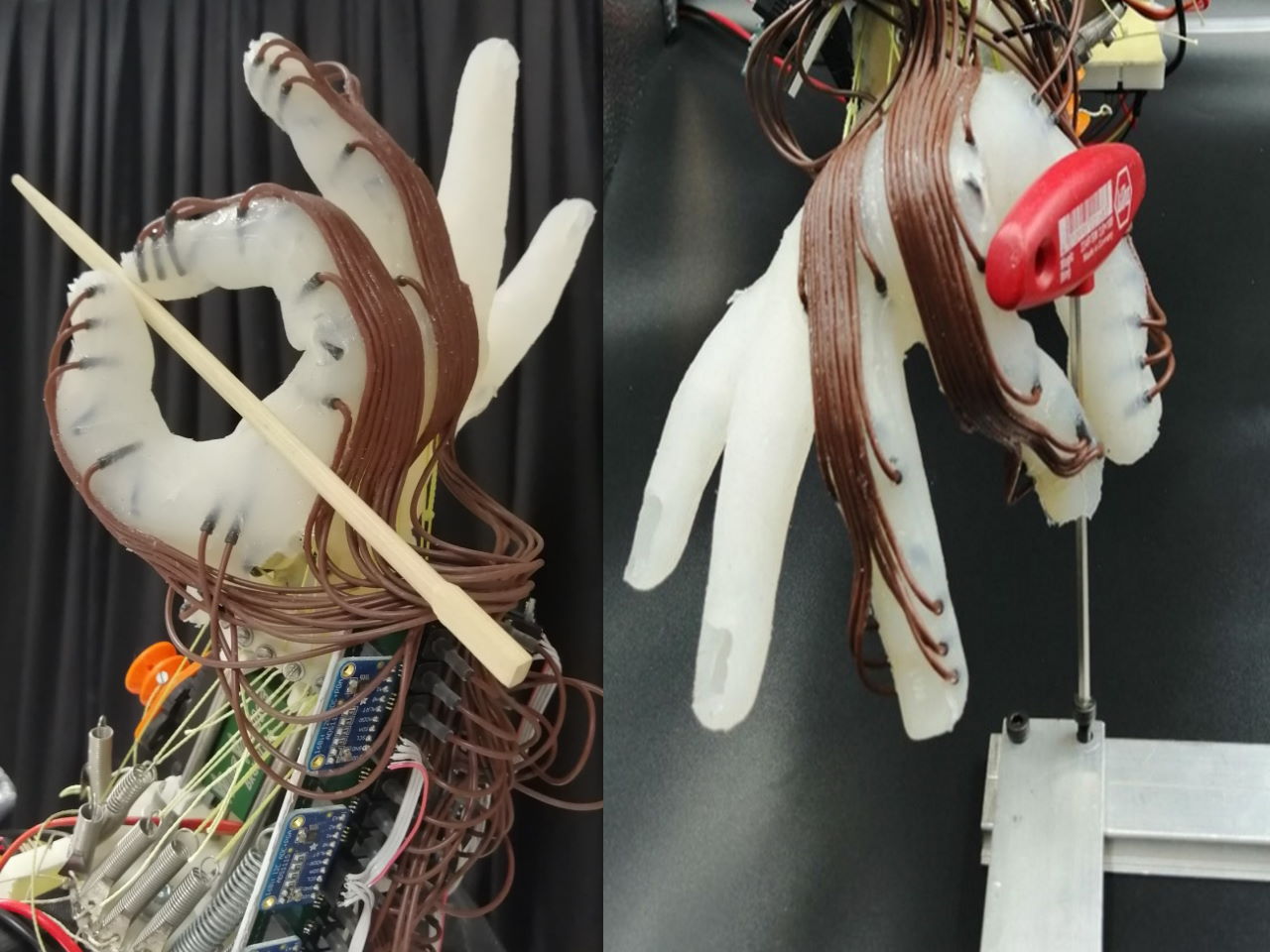
Приклади речей, які може втримати роборука. Kieran Gilday et al. / Advanced Intelligent Systems, 2023
Ідея створювати адаптивні маніпулятори замість навчених хапати конкретні предмети іноді змушує інженерів відмовлятися від схожих на людські кінцівки роборук. Наприклад, ми розповідали про м'які щупальця, які можуть обплутувати речі незалежно від форми і так тримати їх.





