Синхронна робота двох присосок і пневмоприводів допомогла роботу-гусені на швидкості 21 міліметр на секунду доповзти до стіни та видертися на неї з 20-грамовим вантажем. Для цього робота довелося навчити вигинати спину подібно тому, як це роблять гусениці. Він контролює положення своєї голови, тіла та кінцівки, і таким чином здатний втримуватися «на ногах», шукаючи точку опори на стіні. Як робот справлявся із повзанням стінами та навіть плаванні водою, китайські інженери повідомили у IEEE Transactions on Robotics.
Yifan Zhang et al. / IEEE Transactions on Robotics, 2021
Гусінь — кращий стінолаз?
Якщо якесь створіння вміє і повзати, і крастися, і видиратися на вертикальні поверхні, йому пощастило набагато більше, ніж іншим — воно вміє добре адаптуватися до середовища. Тому інженери так і задивляються у бік котів, геконів, змій та власне гусені. Їхнім створінням, сиріч роботам, не вистачає саме вміння адаптуватися під середовища, які за межами лабораторій набагато більш несподівані і складні. Тому навіть найгнучкіша галузь робототехніки — м'яка — полімерні, силіконові та з інших піддатливих матеріалів роботи якої витримують тиск Маріанської западини, потребує більше сил, які б давали роботам змогу міцно триматися на поверхні та рухатися не лише горизонтально.
Порівняно зі своїми жорсткими аналогами м'які роботи володіють перевагами у вигляді простої конструкції, невеликої ваги, безпечної роботи, низької ціни та високої самоадаптованості. І власне через їхню м'якість, повзучі рухи для них — один із найпоширеніших видів ходи. Як правило, вони покладаються на вигини і подовження свого тіла, що змушує їх повзати. А оскільки найкращими м'якими повзаючими прикладами з природи є хробаки, гусениці та інші надзвичайно рухливі тварини із сегментованим тілом, на них і звернули увагу інженери Шанхайського транспортного університету з метою навчити свою робогусінь вигинатися дугою та вилазити на стіни.
Yifan Zhang et al. / IEEE Transactions on Robotics, 2021
Навіщо вигинати робота дугою?
Періодичне спрацьовування сегментів тіла, яке і провокує повзання, насправді подібне до навичок, які потрібні аби «стати на ноги». Однак для останнього вам доведеться долати силу тяжіння, що ускладнює завдання. І хоча раніше інженерам вдавалося пристосувати звивистий рух своїх розробок до лазіння по стінах, за словами дослідників, жоден з них не вмів комбінувати можливість рухатися вертикально і горизонтально: тобто повзаючи по підлозі, наприклад, забратися на стіну.
Щоб робот міг так зробити, йому потрібно відірвати одну кінцівку від землі і дотягнутися до точки опори на стіні. Цей процес вимагає багато сил, які допоможуть підняти частину власної ваги. А оскільки м'яка робототехніка страждає від втрати стійкості через високу гнучкість та нескінченну кількість ступенів свободи руху, інженери повинні знайти компроміс між стійкістю та гнучкістю.
Як це роблять гусениці?
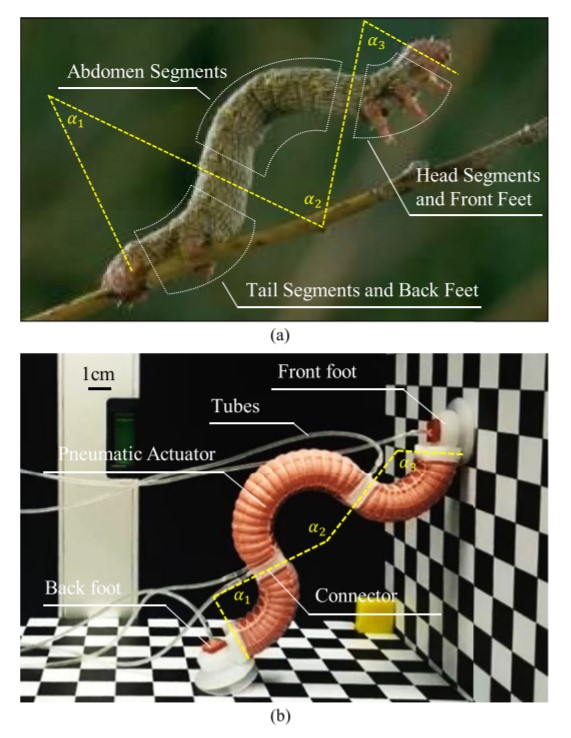
Коли гусінь стикається з перешкодою або приймає рішення видертися на вертикальну поверхню, вона керує кутами вигину своїх сегментів тіла паралельно шукаючи головою собі точку опори. І не зважаючи на те, що її голова може знайти точку опори не точно над кінцівкою, тіло гусені можна розглядати як форму дуги. Цікаво, що гусені зазвичай не подовжуються, а надають перевагу саме фіксованим вигинам: деякі сегменти їхнього тіла вигинаються на 15 градусів, однак напрям цього вигину залишається фіксованим. Тому перші п'ять сегментів, а також з десятого по тринадцятий сегменти, рахуючи від голови зазвичай вигинаються опукло вниз у той час, як з шостого по дев'ятий сегмент (група сегментів живота) зазвичай вигнуті вгору опукло. Контролюючи ці вигини гусені і вдається долати перешкоди на своєму шляху, чого і шукали інженери для свого робота.
Yifan Zhang et al. / IEEE Transactions on Robotics, 2021
Куди виліз робот?
Орієнтуючись на гусінь, вчені розділили своїй робогусені голову і хвіст ще одним набором пневматичних штучних м'язів. Такий поділ тіла дав можливість відтворити функцію вигину різних груп сегментів (голови, живота та кінцівки) з цих м'язів, що зробило деформацію робота симетричною і дало змогу краще контролювати своє положення, щоб створювати різноспрямовані сили, які допоможуть протистояти силі тяжіння та гнучко підніматися по вертикальних стінах.
Кожний м'язовий сегмент складається з повітряної камери, яку деформують повітрям або водою, силіконового шару, який має обмежувати цю деформацію, а також армуючих волокон і герметизуючих з'єднувачів. Так при наповненні повітрям або водою силіконові камери розширюються, як повітряні кулі, а рівномірно намотані армуючі волокна обмежують радіальне розширення та збільшують осьове подовження камер. А для стійкості робота наділили парою вакуумних присосок, які закріплять його на поверхні.
Робогусінь тягне у 15 разів важчий за себе вантаж Yifan Zhang et al. / IEEE Transactions on Robotics, 2021
Так робот може імітувати вигин дугою подібно гусені і рухатися з максимальною швидкістю 21 міліметр на секунду горизонтально і 15 міліметрами на секунду вертикально. При цьому, рухаючись підлогою, він може тягнути за собою корисне навантаження у 500 грамів, що приблизно в 15 разів більше за його власну вагу. Нагору за собою він підніме 20 грамів. Цікаво, що завдяки пневматичному підходу до руху, робот зможе робити майже все те саме і у воді. Для цього потрібно замінити повітря, яке закачується в камеру, на воду, щоб робогусінь не могла сплисти на поверхню. Так вона зможе рухатися на мілководді, а також пересуватися вертикально по бічній стінці акваріума.
Yifan Zhang et al. / IEEE Transactions on Robotics, 2021
Традиційно інженери використовують як джерело руху роботів електромотори. Але м'якій робототехніці пощастило і вона мало того, що може обійтися зовсім без електроніки, так ще й дає змогу використовувати матеріали з пам'яттю форми, повітряні бульбашки, пневматичні еластомірні приводи та інші досягнення матеріалознавців, що реагують на магнітне поле, вологу, тепло або світло.