Американські і китайські інженери представили рекордно маленького крокуючого робота, яким можна дистанційно керувати. Створені зі сплавів з ефектом пам'яті форми роботи розмірами до пів міліметра вміють крутитися, повзати, крокувати і стрибати без жодних гідравлічних або електроприводів — з місця їх зрушає тепло від лазера. Вчені сподіваються, що їхній робот-краб з крихітними клешнями або стрибучий робот з закрученими ніжками стануть у пригоді у розробці медичних мікророботів. Що можна змусити роботів робити під дією лазера, дослідники продемонстрували у статті, опублікованій у журналі Science Robotics.

Northwestern University
Чому робот — краб?
Структурна складність та різноманітність матеріалів з яких створюють існуючих мініатюрних роботів сьогодні обмежені варіантами способів їх виробництва. В результаті в масштабах субміліметрового діапазону більшість роботів набувають форми простих сфер, труб, стрижнів, дуг, куполів або багатошарових плоских структур. Тривимірних форм найчастіше набувають роботи, яких створюють за допомогою двофотонної полімеризації. Не менше складнощів виникає і в тому, щоб наділити таких мікророботів вміннями існуючих великомасштабних. Останнім у цьому плані набагато простіше: їх розміри дають змогу використовувати ширший діапазон способів приведення в дію — електро-, пневмо-, гідроприводи тощо. Мініатюрні ж роботи, яких планують використовувати зокрема в медицині, наприклад, для доставки ліків або у мікрохірургії, змушені покладатися на енергію, що надходить ззовні, у той час як їх рух забезпечуватиметься виключно їхніми власними механічними властивостями.
Тому завданням інженерів є відшукати таку конструкцію для мікророботів, яка б найбільш ефективно використовувала енергію для руху. У мікроскопічному масштабі сильна адгезія, що виникає через поверхневі сили (наприклад, Ван дер Ваальсові сили або капілярні), є істотним обмеженням у русі. Тож обмеження у розмірі обумовлені балансом між можливою м'язовою напругою і адгезійними силами, які вона має долати. І оскільки штучні мікроскопічні створіння інженерів зустрінуть ті самі перешкоди, не дивно, що вчені все частіше звертаються до прикладів з природи. На цей раз прикладом стали краби Cancer irroratus, які справляються з життям у воді, досягаючи в розмірах всього 133 міліметри в поперечнику. У своїй же роботі, щоправда, науковці з університетів Китаю і США реалізували його у 150 разів меншим.
За словами дослідників, форму краба обрали також і тому, що було цікаво реалізувати їхнє пересування. Так робот рухається під дією лазера. Mengdi Han / Science Robotics, 2022
З чого зробили роботів?
Своїх роботів вчені склеювали з елементів розмірами до 10 мікрометрів і складали у конструкції з розмірами до 200 мікрометрів. Щоб зробити їх об'ємними і рухомими, інженери звернулися до методів напівпровідникової промисловості: створили потрібний малюнок (наприклад, краба) пошаровим осадженням різних матеріалів. Крабів створили з шару сплаву з пам'яттю форми (нітинол), який і має забезпечувати потім при нагріванні рух, шару полііміду, який слугує статичним каркасом для робота, а також шару з діоксиду кремнію, який має зв'язувати шари при переході з двомірної форми у тривимірну. Цей малюнок нанесли на поверхню розтягнутого силіконового еластомеру, який після того як напругу зняли, підняв крабів на ноги у визначеній їм заздалегідь тривимірній формі.
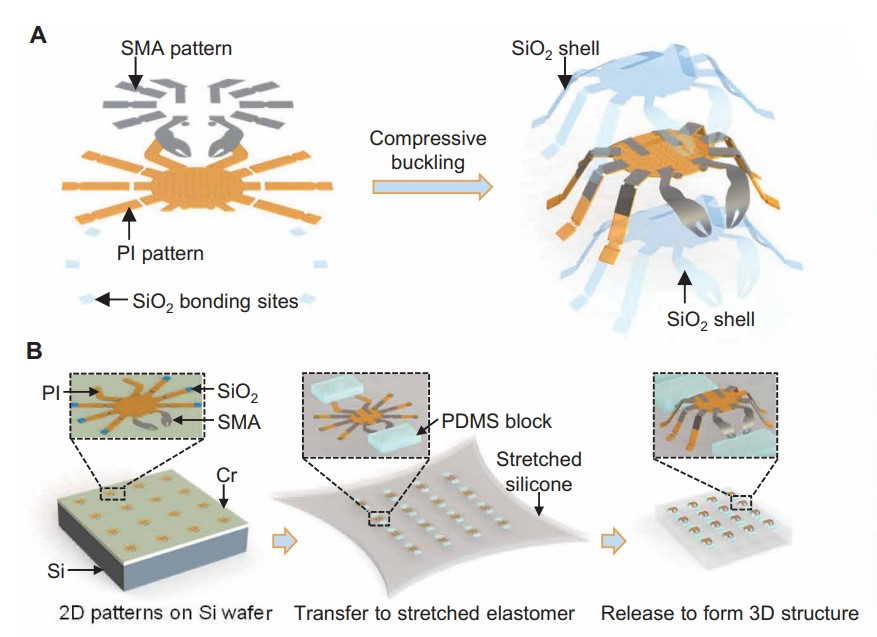
Так виглядає процес створення роботів. Mengdi Han / Science Robotics, 2022
Сумісність процесу виготовлення з різними методами осадження та травлення тонких плівок, підходами до лазерного формування малюнку та методами фотолітографії відкриває широкі можливості вибору геометрії та матеріалів. І завдяки цьому з'явилися не лише роботи-краби, а й складні структури із вигнутими, спіральними і двошаровими кінцівками. З іншого боку, обраний вченими метод передбачає можливість і масштабувати виробництво та створювати багато таких конструкцій за раз.

Кілька створених у процесі роботи «крабороботів». Mengdi Han / Science Robotics, 2022
Як їх навчили стрибати?
Щоб зрушити роботів з місця, інженерам необхідно підвищити температуру, що змусить нітинол (той самий сплав з пам'яттю форми) почати повертатися назад у свою двовимірну форму, але цьому почне протидіяти діоксид кремнію, що змусить у результаті загальну конструкцію деформуватися виключно так, як це знадобиться дослідникам. Без цього весь краб може бути або тільки плоским, або тільки об'ємним. Усі створені вченими структури продемонстрували високий коефіцієнт збереження форми (понад 85 відсотків) після багатьох циклів нагрівання та охолодження.
Створені у ході дослідження роботи. Mengdi Han / Science Robotics, 2022
Стрибати, крокувати і скручуватися створені роботи починали під дією лазера потужністю у 188 міліватів на довжині хвилі у 520 нанометрів. Вчені застерігають, що умови опромінення мають бути підібрані таким чином, щоб не пошкоджувати матеріали, з яких складаються роботи.
Коли робот переходить з однієї фази в іншу – деформується до форми, яку він охолодженим «запам'ятав», та назад – він створює рух. Крім того, що лазер дистанційно керує роботом, щоб активувати його, напрямок лазерного випромінювання також визначає напрямок руху робота. Локальне нагрівання створює асиметрію в геометрії і змушує робота рухатися. Наприклад, сканування зліва направо змушує робота рухатися у цьому напрямку. Регулювання частоти лазерного випромінювання модулює швидкість руху: зниження частоти з 1 до 0,1 герца знижує середню швидкість роботів з 0,12 до 0,017 міліметра на секунду. Подальше збільшення частоти призводить до недостатнього нагрівання та зниження здатності конструкції достатньо деформуватися та відновлюватися, тим самим знижуючи швидкість і рухливість.
Так, наприклад, одна із запропонованих вченими форм стрибає. Mengdi Han / Science Robotics, 2022
І хоча зараз це дослідження має радше ознайомлювальний характер, за словами вчених, вони вважають, що їхня технологія може наблизити робототехніку до створення роботів мікророзміру у промислових масштабах, які можуть виконувати практичні завдання в обмеженому просторі.
Ця команда інженерів не вперше займається створенням мікроскопічних роботів. nauka.ua вже розповідала про створені так само з матеріалу з пам'яттю форми датчики, які можуть покрутитися у повітрі та виявити у ньому забруднення важкими металами. А більше із залученням мікророботів у медицині ми розбиралися у нашому матеріалі «Що таке мікророботи?».
Що ще вміють мікророботи зі сплавів з пам'яттю форми?
🥃Наприклад, цей під впливом алкоголю може підіймати вантаж, що у 2,6 раза важчий за нього самого
🐌А цей прискорив народження равликів і поміряв їм серцебиття
🏎️ А цей, хоча і не мікро, але нагріваючись, перетворюється з дрона на колісного робота





