Японські інженери надрукували на 3D-принтері гнучкі пальці для робота, які мають пропріоцептивні відчуття. П'єзоелектричний ефект разом з повітряними камерами на подушечках дав змогу пальцям відчути кривину вигину і тиск від деформації під час захвату, а 3D-друк може знизити витрати на виробництво. Також завдяки п’єзоелектричному ефекту, вченим вдалося знизити необхідність у живленні датчиків, а тому їх можна буде широко використовувати для маніпуляторів, повідомляється у статті, опублікованій у журналі Nano Energy.
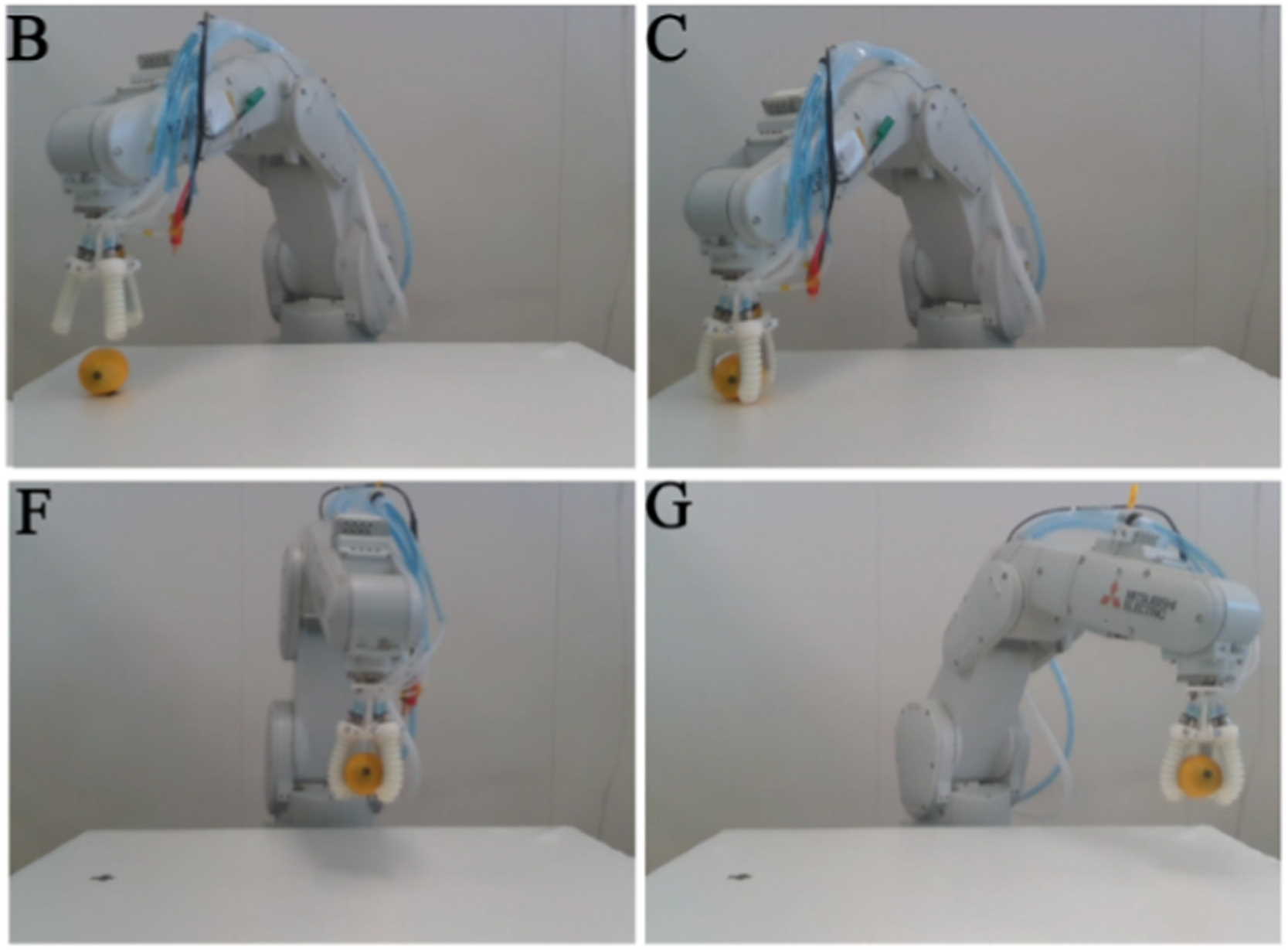
Розроблена вченими кінцівка / Nano Energy, 2020
Навіщо штучним пальцям пропріоцепція?
Щоб роботи могли безпечно маніпулювати крихкими об'єктами і живими організмами, взаємодіяти з ними, інженери звертаються до м’яких матеріалів через властиву їм гнучкість та здатність адаптуватися. Однак для надійного захвату предметів та маніпуляції ними, водночас з силою та піддатливістю, механізмам потрібні відчуття дотику, щоб краще розуміти, як потрібно вхопити предмет та як сильно його стиснути. Фактично, створення безпечного і маневреного роботизованого маніпулятора з можливостями людської руки є однією з найважливіших цілей робототехніки. Одна з основних проблем при їхній розробці - встановлення сенсорів на пальці робота з м’яких матеріалів, бо традиційні датчики жорсткі і погіршують механічні характеристики м'яких частин. Тому існуючі м'які маніпулятори зазвичай розраховані на один тип пропріоцептивних відчуттів: або тиск, або викривлення пальців.
З чого зробили частину кінцівки?
Інженери розробили автономний багатофункціональний датчик з трьома пальцями для маніпуляції предметами. Як чутливий елемент вчені використали тонку плівку з п'єзоелектричного полімеру з полівініліденфториду (ПВДФ) - він широко використовується для гнучких сенсорів з автономним живленням завдяки високій механічній гнучкості та низькій вартості. Вбудований датчик забезпечує відчуття кривини і тиску з максимальним відгуком 0,55 мікровольт на метр.
Його інженери виготовили за допомогою мультиматеріального 3D-друку, який дав змогу інтегрувати і сенсори, і налаштування жорсткості в конструкцію самого пальця робота. За словами вчених, це доступний спосіб розробки сенсорів, які будуть використовуватися не лише як чутливі елементи для робототехнічних додатків, але і як активні функціональні матеріали для контролю над всією системою.
Як він відчуває?
Одна з особливостей конструкції - використання п'єзоелектричного ефекту, тобто датчик не вимагає великих витрат на живлення, адже під час деформації у матеріалі виникає електрична напруга, величина якої залежить від величини механічної деформації. При цьому п'єзоелектричний ефект проявляється максимально тільки за механічного впливу вузького напрямку, а не з будь-якої сторони, а тому його можна використовувати і як сенсор. У розробці інженерів він визначає кривину впливу і початкову жорсткість пальця. Також вчені додатково підвищили чутливість завдяки використанню мікроструктурованих шарів, які покращують розподіл тиску на п'єзоелектричний матеріал, тому він діє не просто як елемент зі змінною жорсткістю, а і як сенсор, що дає пальцю здатність до самовідчуття. Конструкція пальця легко згинається від тиску повітря завдяки повітряній камері, а його жорсткість регулюється створенням вакууму в окремій камері. Розроблений механізм вакуумного заклинювання, який створили за допомогою якого кількох покладених один на одного шарів матеріалу, в яких можна регулювати “всмоктування” повітря.
Поєднання п'єзоелектричного ефекту та вакууму у камерах на пальцях дає їм змогу правильно захоплювати і утримувати будь-який об'єкт, забезпечуючи необхідну силу. Пальці здатні визначати кривизну вигину і визначати жорсткість завдяки тиску вакууму. М’який надрукований сенсор легко деформується, а отже забезпечує більшу площу контактної поверхні. Таким чином, вчені досягли чутливості з м'якими трикутними лініями мав чутливістю 0,38 вольта на кілопаскаль за тиску, меншого за 7 кілопаскаль, а зі збільшенням тиску, чутливість підвищувалася до 0,06. Це дослідження значно розширить можливості використання роботів, а подібні вбудовані датчики з автономним живленням не тільки дозволять роботам безпечно взаємодіяти з людьми і навколишнім середовищем, а й усунуть зменшать витрати на живлення датчиків.