Хоч головним героєм останніх новин став «Персеверанс», який привіз на Марс дрон, зібрав там кисень та зробив селфі, ми вирішили поділитися з новими досягненнями чотириногих ходячих, гуманоїдних гігантських, м’якотілих рибоподібних та інших роботів. Розповідаємо про розумну тканину, яка використає ваш піт для заряджання, робоящірку, яка підкорила стіну, та робота Хрустика, покликаного навіть найгіршу комедію зробити приємною за кращими прикладами взаємодії людина-попкорн.
Розпочнемо із «Персеверанса» та його селфі зі своїм дроном Ingenuity. Персі зробив 62 окремих знімка себе, пейзажу за спиною та поверхні під собою за допомогою камери у своїй роботизованій руці, які потім склали у гарний панорамний знімок.
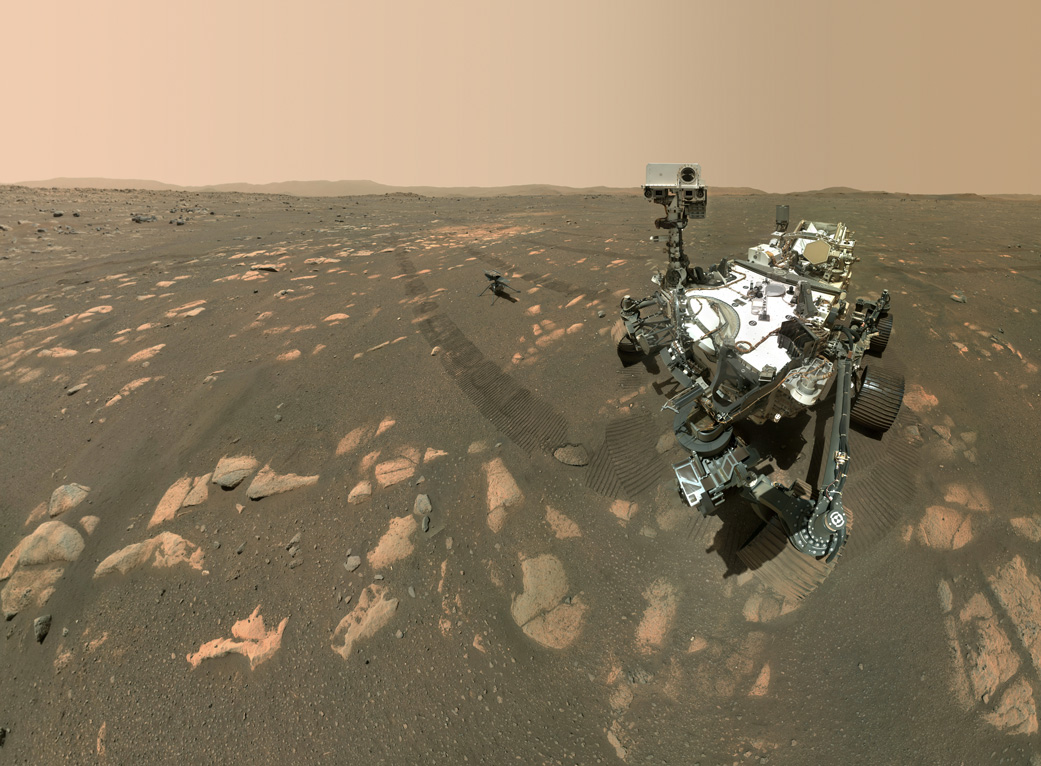
Фото «Персеверанс» зробив так, ніби позував для марсіанського фотографа. Але все це мозаїка із його знімків, передана на Землю / NASA, JPL-Caltech, MSSS
Брати наші менші чотириногі
Цього місяця у нас є з чим привітати популярних серед інженерів чотириногих ходячих роботів. Слідом за Spot від Boston Dynamics рукою охазяйнувався його швейцарський родич, робот ANYmal, і навчився відчиняти двері. «Важкі та непорушні» двері, за словами розробників, ANYmal сам відчинив ручкою, і навіть чинив спротив одному з інженерів, який двері хотів закрити. Таке завдання може здаватися вам банальним, однак для робота навчитися щось хапати своїми руками та проводити якісь маніпуляції означає навчитися тримати рівновагу, правильно координувати свої рухи та оцінювати свою силу. Завдяки розробленому алгоритму, який допомагає швейцарському роботу планувати свої дії та прикладену силу, ANYmal демонстрував і вільне володіння своєю рукою і вміння хапати різні речі.
Швейцарський ANYmal відчиняє двері, справляється з двокілограмовою гиркою та не дає інженеру закрити двері. Robotic Systems Lab / YouTube
Алгоритм ж норвезьких інженерів дав змогу їхньому чотириногому підлаштовуватися під умови навколишнього середовища та самостійно обирати довжину своїх стегнових та гомілкових кісток. Так робот успішно пройшов пісок, гравій та бетон, а потім і сам обрав найкращий спосіб для руху травою та зледенілими стежками.
Норвезький чотириногий робот, якого наділили вмінням аналізувати середовище та підбирати оптимальну довжину кінцівок, щоб однаково ефективно бігати і гравієм, і ожеледицею. Tønnes Nygaard / YouTube
А от австралійські інженери вирішили навчити свого робота підлаштовувати під середовище не лише лапи, а і спину. Так їхній симпатичний чотирилапий робот розміром з гекона зміг видертися на стіну, поєднуючи рухи кінцівок з рухами хребта з боку в бік, як справжня ящірка. Щоправда, на відміну від ящірок, він вміє вигинати лапи і всередину, і назовні, однак за словами інженерів це просто приємний бонус, від його успіх у скелелазінні не залежав.
Робот плазує стіною з килимовим покриттям та рухає спинкою. Johanna T. Schultz, Hendrik K. Beck, Tina Haagensen, Tasmin Proost, Christofer J. Clemente
Втім, хоч роботи з кінцівками і подобаються інженерам саме за те, що можуть долати набагато більше перешкод, ніж колісні — вчити їх ходити досить складно. Тим паче, що десь на колесах проїхати було б набагато зручніше. Тож китайські інженери з Tencent вирішили наділити свого чотириногого робота ще й колесами на колінах. Окрім того, що він тепер вміє обходити перешкоди і «на ногах», і об’їжджати колесами, він вміє робити сальто, оговтуватися після падіння та стрибати. Також робот може вставати на два задніх колеса й використовувати свої передні кінцівки майже як руки та навіть вхопити предмет.
Робот від Tencent обходить, об’їжджає та перестрибує перешкоди, встає після падіння та перетворюється на робота прямоходячого, використовуючи лише задні колеса. Hic tech / YouTube
Такі різні дрони. Акробатичні та комахоподібні, що вміють планувати рух та об’єднуватися разом
Звісно, що головним дроном місяця став Ingenuity, який здійснив перший тестовий політ на Марсі. Він розкрутив лопаті до 2537 обертів на хвилину та за шість секунд піднявся у повітря на три метри на планеті, де гравітація складає приблизно одну третю від земної.

GIPHY
Але земні дрони також не пасуть задніх. Використовувати дрони для доставки ваших посилок звучить досить перспективно, аж поки не постане питання доставки чогось більш важкого за листи. Збільшення ваги, яку будуть здатні підняти дрони, вимагатиме зменшення часу польоту, маневровості і все одно не допоможе підняти щось важче за кілька кілограмів. Втім, навіщо вигадувати надсильних дронів, якщо можна навчити кооперуватися звичайних? Так і вчинили американські інженери та розробили алгоритм, який допоміг чотирьом дронам разом підняти п’ятикілограмову коробку.
Централізована система скоординувала дрони між собою та навчила підтримувати один одного та вантаж. Georgia Tech / YouTube
Втім, дрони все ще також погано вміють самостійно та швидко планувати та змінювати траєкторії свого польоту, особливо у складних умовах. Для коптерів та дронів часто використовують спрощені алгоритми для зменшення обчислювальних потужностей, а тим самим і обмежуючи використання всіх можливостей малих літальних форм. Китайські інженери не погодилися з тезою про те, що поєднання динаміки, плавності і безпеки можливе лише за спрощених умов, та запропонували алгоритм, який допоміг дрону побудувати свій шлях так, щоб пролетіти у рухому рамку.
Дрон перелаштовує траєкторії польоту та не плутається навіть у рухомих цілях. Fei Gao / YouTube
Але не варто забувати і про найменших представників літаючих роботів — їх можна створити дуже і дуже багато, а тому вони дуже і дуже швидко зможуть дослідити найскладніші середовища. Так інженери наділили свого орнітоптера з вагою, як у великого джмеля, м’якими крилами і навчили його швидко ними махати, що дасть йому змогу зависати у повітрі та швидко оговтуватися після зіткнення. Робот махає крилами зі швидкістю майже 500 разів на секунду та вміє робити сальто всього за 0,16 секунди.
Джмелеподібний дрон у майбутньому інженери планують зробити схожим на бабку та використовувати рій таких роботів для запилювання посівів або пошуку і порятунку постраждалих. MIT / YouTube
Роботи людиноподібні. Стійка до падінь Лола та керування роботом через VR
68-кілограмова гуманоїдна Лола з Мюнхенського технічного університету навчилася ходити не лише рівною підлогою дослідницької лабораторії та навіть витримала поштовх гойдалки. Вона має 26 електрично приведених в дію суглобів та зріст 176 сантиметрів, проте зовсім не має зору на кшталт камери або попередньої інформації про середовище. Втім, датчики сили і крутного моменту у руках та ногах, а також акселерометр і кільцевий лазерний гіроскоп у верхній частині тіла Лоли допомогли їй правильно реагувати на зміни ландштафту та успішно пройти смугу перешкод.
Людиноподібний робот Лола, технічно незряча та неготова до змін рельєфу лабораторної підлоги, успішно проходить смугу перешкод. TUM Chair of Applied Mechanics / YouTube
Японська компанія Man-Machine Synergy Effectors представила прототип великого людиноподібного робота, який вміє повторювати за вашим тілом, руками і головою за допомогою VR-стенду. Робот має по три пальці на кожній руці та зміг взяти ними м’яча й перекласти його в іншу руку. Управляти ним розробники пропонують через важелі та з одягнутим шоломом віртуальної реальності.
Гігантський телекерований робот від Man-Machine Synergy Effectors з Японії. Він може бути корисним на великих виробництвах, місцях катастроф та інших складних умовах. Human Machinery Co., Ltd. / YouTube
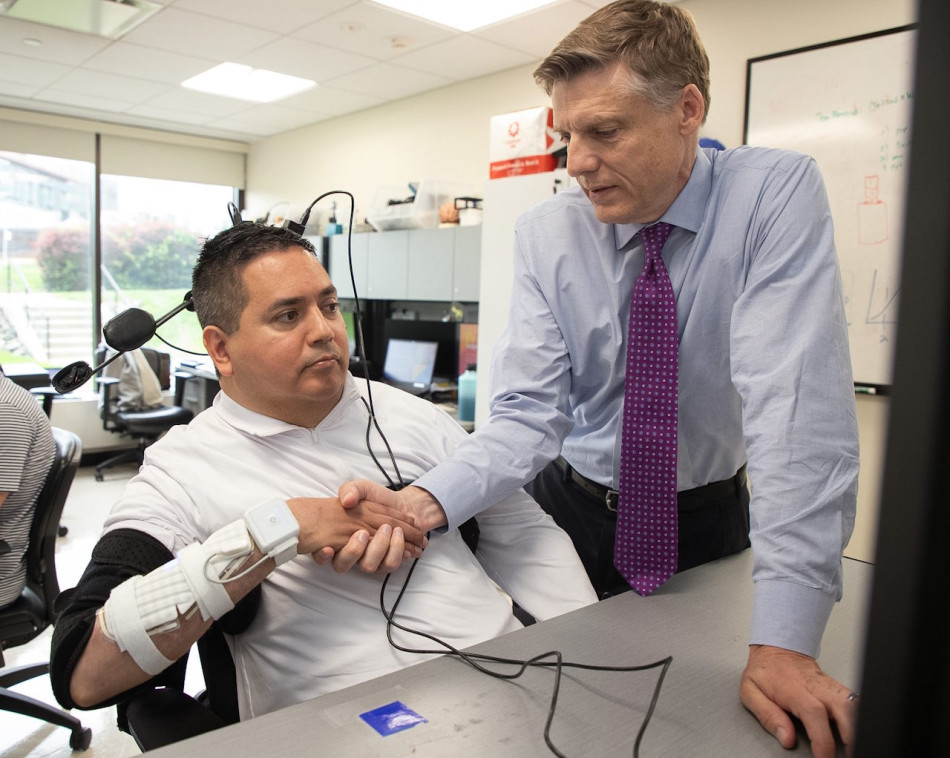
Наостанок вирішили додати не зовсім людиноподібного робота, але який може набагато більше. От ви би змогли одразу дістати потрібний предмет із закритої коробки, не знаючи її вміст? А розроблений американськими інженерами маніпулятор може! RF-Grasp використовує радіочастоти, щоб виявляти заховані об'єкти, які потім за допомогою зчитувача зможе впізнати та обрати потрібні. На зап’ясті у робота також розміщена звичайна камера, яка допомагає роботу краще будувати картину того, що його оточує. Він зміг навіть подолати перешкоди на кшталт пакування або безладу у коробці.
MIT Media Lab / YouTube
Сорочка використала людину для підзаряджання, подорож у VR через браслет, а колонка відстежила ваш серцевий ритм
Розумний одяг вже зовсім не область наукової фантастики, однак все ж він не був досить розумним, щоб не потребувати заряджання від розетки. Але американські інженери побили і цей недолік та розробили розумну куртку, яка зможе і сама виробляти для себе електроенергію. Щоправда, для цього вам доведеться попітніти. Трибоелектричні генератори у куртці зберуть енергію від вашого бігу, а гідрогель використає ваш піт та стане біотопливним елементом. За словами інженерів, ці два способи генерувати енергію можуть працювати безперервно та за 10 хвилин зібрати достатньо енергії для півгодинної роботи дисплею.

Типовий перехожий у розумній куртці / GIPHY
Просто так дивитися на віртуальну реальність нецікаво та і зовсім марно, якщо не можеш до неї доторкнутися. Втім, поки вам для віртуального офісу або ігор пропонують вдягати рукавички, використовувати контролери або сподіватися, що камера у вашому VR-шоломі швидко розпізнає ваші рухи. Однак, швейцарські вчені запропонували взаємодіяти із сенсорними інтерфейсами у віртуальній реальності через браслет та яку-небудь тверду поверхню. Браслет розпізнає ваші постукування пальцями, а ви зможете пограти на віртуальному піаніно, набрати текст, розсортувати фото на панелі та повзаємодіяти з ігровими елементами.
Цікаво, що і Facebook вирішив звернутися до такого аксесуару та представив свій прототип нейроінтерфейсу для віртуальної реальності. Їхній варіант браслету «бачитиме» ваші рухи завдяки електричній активності рухових нервів, коли вони передають інформацію від мозку до кисті. За словами розробників, вам буде достатньо просто подумати про якусь дію, а браслет зрозуміє вас та повзаємодіє з цифровими об’єктами.

Браслет від Facebook / tech.fb.com
Можете жалітися на голосових помічників, які підслуховують ваші розмови, однак тепер вони можуть і відчувати биття вашого серця. Насправді це не так погано, як здається, адже електрокардіографію можна проводити лише у медичних закладах і лікарям доводиться торкатися пацієнтів, а безконтактна технологія могла б це виправити. Тож американські інженери оснастили розумну колонку алгоритмами машинного навчання, пристосованими до відстеження серцевого ритму, яка вловить найменші коливання вашої шкіри, викликані серцебиттям, на відстані 30-60 сантиметрів.
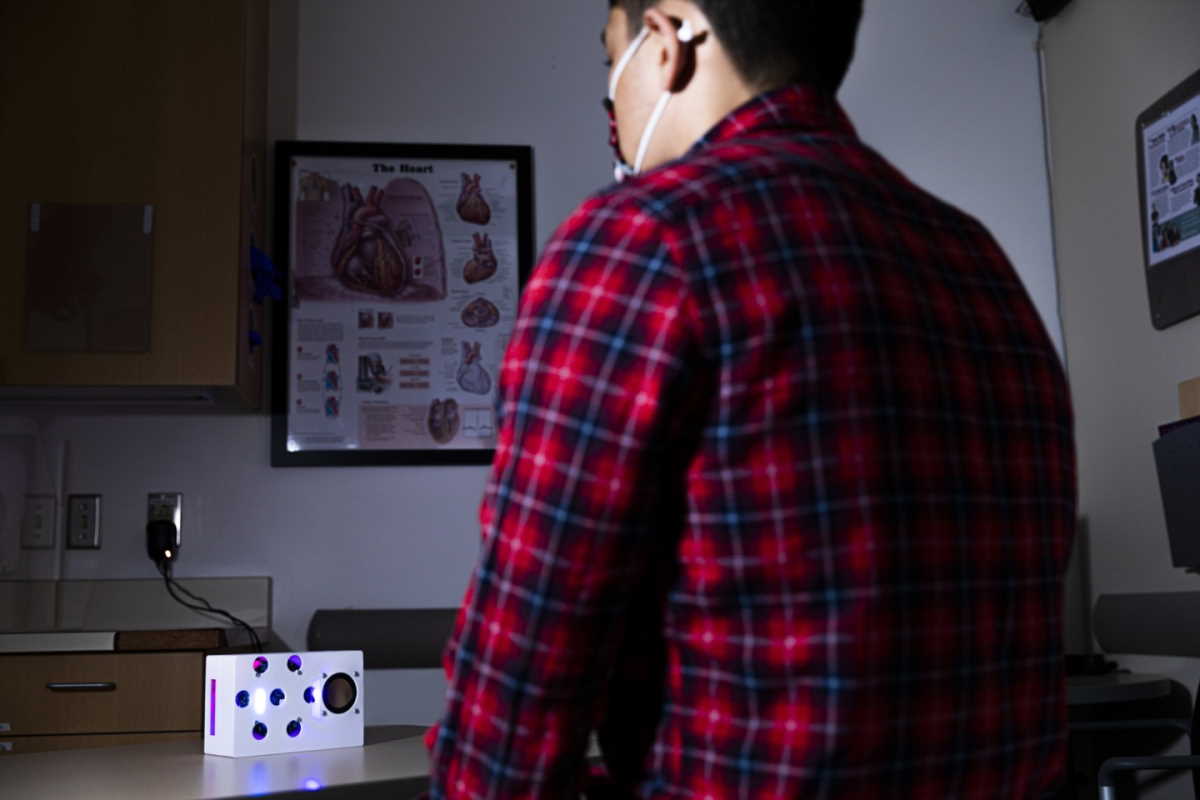
Розумна колонка вимірює серцебиття дослідника, що сидить перед нею. Mark Stone / University of Washington
М’якотілий робот витримав тиск Маріанської западини
Не можемо не згадати новину про несамовиту стійкість маленького рибоподібного м’якого робота, якому вдалося поплескати плавниками на дні Маріанського жолоба на глибині 10900 метрів. Китайські інженери надихнулися найглибоководнішою мешканкою западини та за прикладом будови її черепа розділили електронні плати робота на декілька частин, що і допомогло йому владнати із величезним тиском води і відповідальності.
Вільне плавання робота у Південно-Китайському морі. NPG Press / YouTube
Робот Хрустик та взаємодія людина-попкорн
І звісно залишаємо найсолодше (або найсолоніше) наостанок та представляємо вам «попкорнпаньйона для спільного перегляду фільмів» від американських студентів, які створили робота Crunchy (далі ми зватимемо його Хрустиком) із коробки для попкорну. Він покликаний мінімізувати почуття замкнутості та самотності і зробити «комедії з найгіршим рейтингом приємними» завдяки взаємодії у людина-попкорн (Human-Popcorn Interaction, HPI).
Якщо ви вперше чуєте про таку, то дарма — якісний аналіз зображень та відеозаписів з того, як люди і мульт-герої їдять попкорн проілюстрував декілька ключових режимів такої взаємодії: дотик (тактильна взаємодія), близькість людини та попкорну та погляд на коробку. Свої спостереження вчені перенесли на робота Хрустика та подарували йому окуляри, сенсорний датчик, колонку і перетворили на справжнього кіномана, який полюбляє комедії та обійми.
Хрустик готовий до роботи. Waki Kamino / YouTube