Команда вчених вирішила розібратися із тим, які форми пересування обирають ящірки, і як собі забезпечують рух такі їхні види, що мають короткі кінцівки. Для цього дослідники не лише спостерігали за бігом плазунів, а і побудували роботизовану версію, яка допомогла створити моделі руху ящірок. У підсумку з'ясувалося, що різномаїття патернів пересування ящірок напряму пов'язане із їхньою морфологією, повідомляють вчені у Proceedings of the National Academy of Sciences. Також автори роботи сподіваються, що їхні спостереження стануть у пригоді і в робототехніці. Коротко про дослідження розповідає Технологічний інститут Джорджії.
Baxi Chong at al. / Proceedings of the National Academy of Sciences, 2022
Навіщо потрібна робоящірка?
Ящірки розвинули безліч можливих форм тіла від звичних нам короткотілих плазунів із добре розвиненими кінцівками до безногих або коротконогих, але натомість довших особин. Нещодавні дослідження показали, що коротконогість деяких видів ящірок, як-то Brachymeles чи Lerista, пов'язана із пристосуванням до середовища. Ми розповідали про роботу американських науковців, яка показала, що зміни клімату змусили деяких ящірок з роду Brachymeles втратити та знову повернути собі кінцівки. Однак не менш цікавими є не лише еволюційні зміни, які спіткали ящірок, а і те, як вони використовують морфологію свого тіла для руху. Цим питанням «самодеформації», тобто координації руху тіла і кінцівок у ящірок, і зайнялися дослідники з Технологічного інституту Джорджії за допомогою робоящірок.
Як пересуваються тварини?
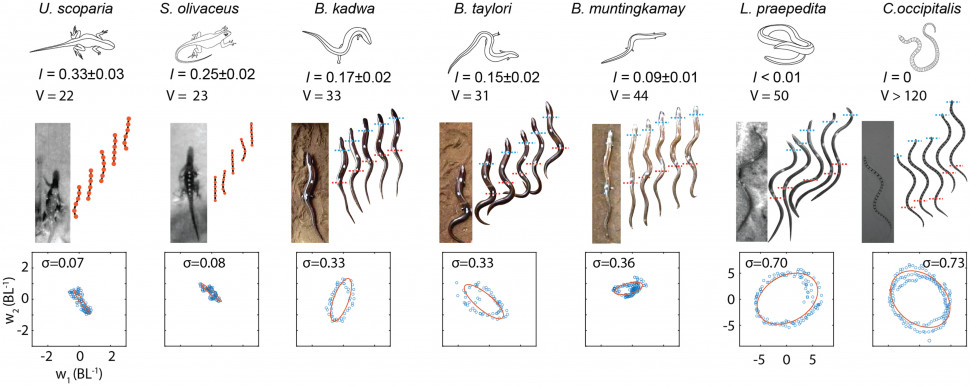
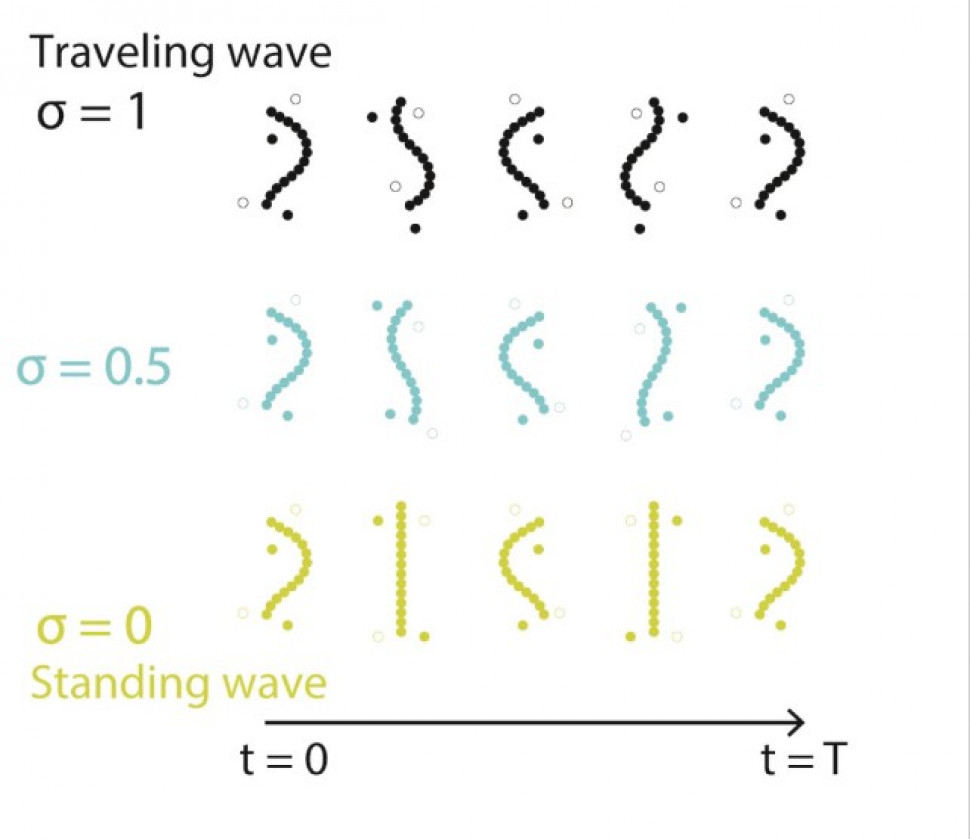
У змій і ящірок можна виділити такі моделі руху: змії в основному використовують хвилеподібні рухи тіла за біжучою хвилею для створення тяги, так зване «наземне плавання», а ящірки ж натомість послуговуються інерційним бігом, посилюючи рух своїх кінцівок хвилеподібними вигинами тіла за стоячою хвилею. Вчені озброїлися відео із рухом коротконогих ящірок з однаково розвинутими задніми і передніми кінцівками, ящірок із добре розвиненими кінцівками, а також ящірки Lerista praepedita із майже повністю редукованими кінцівками. Кінцівки суттєво впливають на динаміку руху: аналізуючи відео, науковці побачили, що добре розвинені кінцівки дають ящіркам можливість перекласти на них свою вагу, тоді як у безногих вага приходиться на черево, що завдяки хвилеподібному руху з біжучою хвилею дає можливість ефективно створювати тягу при взаємодії із середовищем.
Baxi Chong at al. / Proceedings of the National Academy of Sciences, 2022
При цьому, якщо ящірок з більшими кінцівками помістити у таке середовище як пісок, то вони також здатні перейти до «зміїного» способу руху, переклавши навантаження з лап на черево. Таке різномаїття варіантів локомоції підтверджує і роботизований аналог ящірки з чотирма рухомими кінцівками та двома суглобами, які вигинають тіло. На ньому вчені випробували моделі руху, які створили, спостерігаючи за ящірками, та показали, що динаміку їхнього руху можна описати комбінацією використання біжучої і стоячої хвилі, а співвідношення амплітуд цих компонентів знаходиться у зворотній залежності від ступеня редукції кінцівок та подовження тіла. Перевага ж хвилеподібного руху тіла за біжучою хвилею виникає тоді, коли домінуючий механізм створення тяги походить від тіла, у процесі цього «наземного плавання».

Baxi Chong at al. / Proceedings of the National Academy of Sciences, 2022
Раніше ми вже розповідали, як роботи допомагають краще зрозуміти живих істот. Наприклад, надрукований на 3D-принтері робот-гекон показав, як цим плазунам вдається втримуватися на вертикальних поверхнях. А інший робот допоміг біологам розібратися із тим, як раки-богомоли вміють «битися» своїми придатками. До того ж, часто робототехніка сама бере натхнення з природи: наприклад, завдяки спостереженням за ящірками, інженери побудували робота, здатного повзати стінами, так само вигинаючись.




