Американські вчені представили звіт про першу лапароскопічну операцію зі зшивання кишківника, проведену роботом самостійно без втручання оператора. Роботу STAR довірили з'єднання сегментів кишки живим свиням під наркозом через невеликі отвори у тілі. STAR за допомогою інфрачервоних маркерів відстежував положення тканин, самостійно планував нанесення швів, реагував на деформацію тканин, наприклад, при диханні тварини, і таким чином успішно провів операцію. У його роботу втручалися лише якщо робот повідомляв про помилку у нанесенні шва — наприклад, пропускав його. Результати роботи STAR опублікували у журналі Science Robotics.

Johns Hopkins University
Як можна довірити роботу операцію?
Насправді у хірургічних відділеннях роботи з'явилися давно — вони, наприклад асистують лікарям, які керують механізованими руками, спостерігаючи за пацієнтом за камерами. Точність таких маніпуляцій росте принаймні завдяки тому, що руки у робота не трясуться. Таке втручання дає змогу добитися мінімального травмування, знижує ризик інфекцій і так скорочує період відновлення, а також забезпечує ефективність, безпеку та узгодженість дій незалежно від навичок та досвіду окремих хірургів.
Рівні автономії медичних роботів різняться: від простого дистанційного керування з неперервним контролем з боку людини до автономії рівня контролю обраних роботом рішень та повністю самостійної роботи без втручання фахівців. Найбільш відомим прикладом є хірургічна роботизована система da Vinci, яка працює під контролем лікаря. А першою демонстрацією самостійності роботів стала проведена на свині in vivo ще 2016 року операція з проведення анастомозу кишківника (операція зі з'єднання сегментів кишківника накладанням швів), де втручання людини було мінімальним. Однак досі про лапароскопічні операції, тобто втручання через невеликі штучні отвори у тілі, за участі роботів відомо лише на моделях у лабораторіях.
У цій роботі вчені з університету Джонса Гопкінса, які першими і дали роботу прооперувати свиню у 2016, вперше продемонстрували робота STAR (Smart Tissue Autonomous Robot) за лапароскопічною операцією, де він провів анастомоз кишківника живій свині під наркозом.
Що мав зробити робот?
У такому виді втручання як анастомоз кишківника, дуже важливі такі параметри як відстань між швами, їхній розмір та натяг, які безпосередньо впливають на якість анастомозу, що, у свою чергу, покращує результати лікування пацієнтів та знижує частоту рецидивів та ускладнень після операції. Також складність операції полягає у тому, що крім необхідної для накладання швів маневровості та повторюваності рухів, вона проводиться на м'яких тканинах кишечника, які створюють великі труднощі для хірургів через непередбачувані еластичні та пластичні зміни. Отже, на відміну від інших втручань, і хірурги, і роботи повинні постійно пристосовуватися до непередбачуваних змін. А тому це найкраще завдання для медичних роботів, щоб перевірити їхній професіоналізм.
Крім цього, робота вирішили випробувати в умовах лапароскопічної операції, а не відкритого хірургічного втручання. У таких умовах видимість обмежена тим, що бачить камера, а доступ — отворами в кілька сантиметрів. Щоб виконати операцію, STAR повинен був відстежувати стан тканин, враховувати дихання пацієнта, взаємодію інструментів з тканинами, повідомляти оператора про заплановані дії, зміну планів та, звичайно, помилки.
У цьому STAR допомагали його власне програмне забезпечення та машинний зір через інфрачервоні камери та монохромний 3D-ендоскоп. Система камер дозволяє STAR самостійно відстежувати нанесені хірургами на тканини маркери, видимі в інфрачервоному діапазоні, незалежно від умов освітлення, а так планувати свої дії. Двовимірне зображення камери також використовувалося як візуальний зворотний зв'язок для оператора.
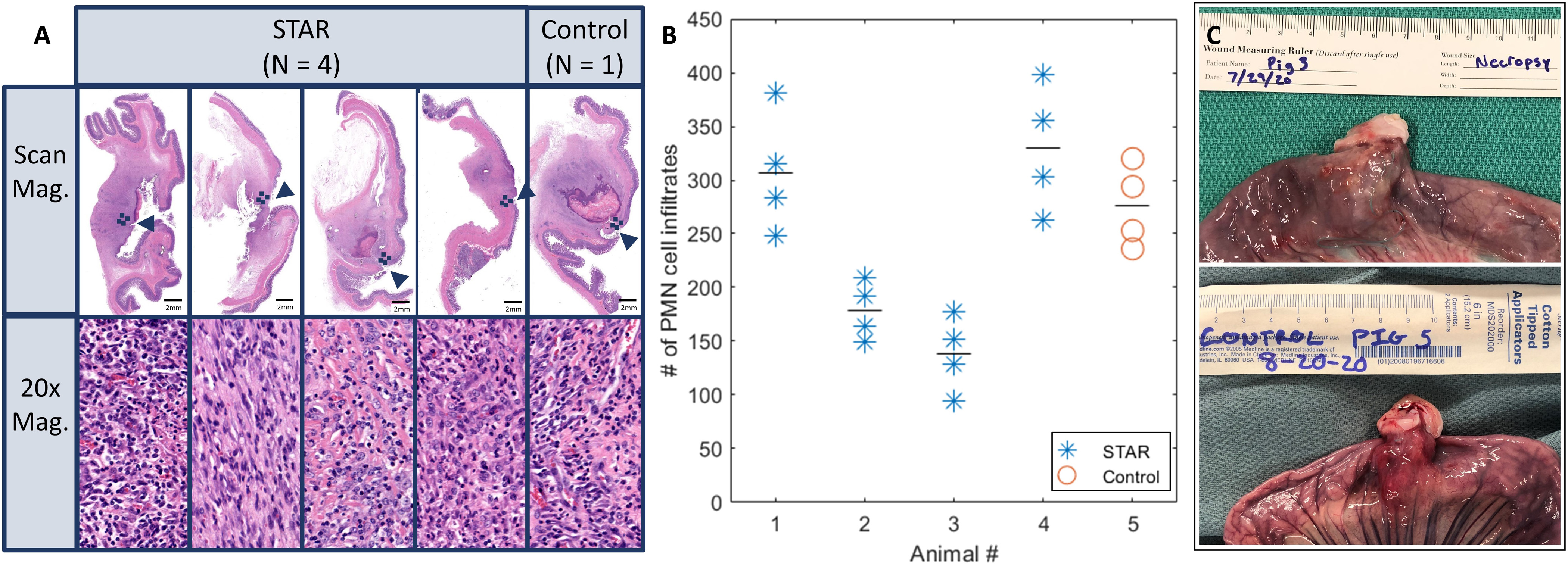
Гістологія тканин свиней, прооперованих роботом, та з контрольної групи (а), а також накладені шви. H. Saedi, Science Robotics, 2022
Як пройшла операція?
За допомогою алгоритму, який допомагав відстежувати стан тканини, STAR самостійно оцінював, коли пацієнт не дихав, а отже його тканини не рухалися. Обираючи момент, робот створював два плани на накладання швів, які мали з'єднати два інфрачервоні маркери, та питав у оператора, який йому обрати. Тільки-но якийсь план дій затверджували, робот приступав до накладення швів, а затим знову оцінював стан тканин. Так, якщо він помічав відхилення більш як на три міліметри, він питав оператора, чи є необхідність змінювати встановлений раніше план, або продовжувати діяти за ним. Якщо ж накласти шов роботу не вдавалося і він, наприклад, не проходив крізь два шари тканини, то оператор через користувацький інтерфейс самостійно накладав його, а потім STAR продовжував операцію.
За словами дослідників, хоча оператору і доводилося втручатися у разі пропуску шва чи помилці при його накладанні, понад 83 відсотки завдань робот виконав самостійно. Основною метою цієї роботи було знизити навантаження на оператора за рахунок додаткових автономних функцій. У попередньому подібному експерименті, де втручання було відкритим, самостійно робот наклав менш як 60 відсотків швів та не мав можливості оцінити дихання та пропонувати кілька варіантів дій. Тому представлений у цій роботі варіант STAR забезпечує помітно більшу автономність і точність.
Чи замінить цей робот хірургів?
Операції провели на чотирьох свинях, та у середньому робот справився за 62 хвилини. Загально STAR наніс 86 швів. Через тиждень після операції тваринам провели розтин, щоб оцінити якість здійсненої роботом роботи та порівняти її з контрольною твариною, якій операцію провели вручну. Гістологічний аналіз не засвідчив помітної різниці між експериментальною і контрольною групами, а шви виявилися однаково герметичними при перевірці тиском.
Однак поки STAR має деякі вагомі обмеження. Його робота все ще залежить від зручного йому положення тканин, обмежень систем машинного зору та його можливості оцінювати взаємодію інструментів з тканинами. Щоб отримати повну оцінку роботи STAR, вчені також провели серію експериментів на штучних тканинах, де порівнювали робота з ручною роботою хірургів та операціями, проведеними роботом (da Vinci) під керуванням людини. І хоча поки цього недостатньо, щоб мати повне уявлення про роботу STAR in vivo, проведена операція є доказом працездатності нової системи, яка забезпечить роботу медичну самостійність.
У майбутньому STAR може допомогти стандартизувати деякі операції, які не залежатимуть від людського фактора, та знизити навантаження на хірургів і передати їм наглядову роль, щоб гарантувати безпеку операції загалом. А більше про роботів у медицині ми розповідали у нашому матеріалі «Доктор-робот».