Американські інженери показали робота-стрибунця на пружині, який зможе відскакувати не лише від пласкої твердої поверхні, а і з гілки дерева чи трави. Допомогла в цьому модифікована конструкція засуву для спрацьовування пружини, що підлаштовувала робота під характеристики стрибкового майданчика. Своїм задумом дослідники поділилися у Journal of The Royal Society Interface.

Приклад відстрибування з гілки з новим пружинним механізмом. Sathvik Divi et al. / Journal of The Royal Society Interface, 2023
Навіщо роботам стрибати?
Вміння стрибати добре розвинене у невеликих тварин, як-от жаби, коники чи блохи, щоб вони могли долати великі відносно своїх розмірів відстані. З огляду на це й інженери розмірковують над тим, щоб доповнити різномаїття способів пересування роботів, особливо малих, стрибанням, щоб додати їм мобільності у важких місцевостях. Але більшість досліджень зосереджувалися на стрибанні з твердих поверхонь, тоді як, наприклад, коники можуть підлаштувати стрибок і до листків трави. Надихнувшись цим, дослідники університету Карнегі-Меллон створили для дрібних роботів платформу, що допоможе і їм краще підлаштовуватися під середовище.

Стрибковий механізм для роботів, який розробили дослідники. Sathvik Divi et al. / Journal of The Royal Society Interface, 2023
Куди дострибався робот?
Науковці звернулися до пружинного механізму, опосередкованого засувом (latch-mediated spring actuation, LaMSA). Він дозволяє запасати потенціальну енергію в пружині та вивільнює її під впливом тригера, як-от навантаження. В природі таким механізмом користуються, наприклад, раки-богомоли, мурахи одонтомахуси та навіть деякі спори грибів.
Науковці випробували кілька варіантів засувів та модифікували LaMSA так, щоб засув міг забезпечувати не лише вивільнення енергії, а і опосередковував передавання енергії між стрибуном та поверхнею, з якої він стрибатиме. Віддача, наприклад, гілки додала засуву додаткової енергії, що допомогло адаптуватися стрибуну. Створенні для дослідження математичні моделі, сподіваються вчені, допоможуть у розробці більш ефективних стрибунів серед роботів.
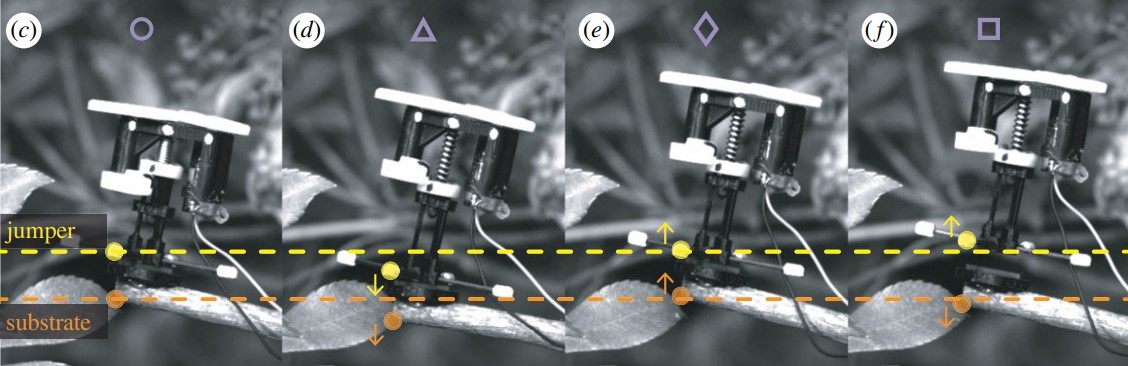
Послідовність стрибання з гілки, де навантажена пружина вивільнює енергію після віддачі від гілки, що активує засув. Sathvik Divi et al. / Journal of The Royal Society Interface, 2023
Раніше ми розповідали про пружинний механізм для робота, який дозволив йому обскакати у висоті стрибків комах, жаб та найспритніших приматів. Завдяки пружинному каркасу робот стрибнув на 30 метрів — у сто разів вище за свій зріст.





