Робот, який може стояти, стрибати і зберігати рівновагу на похилих або нестійкій поверхні всього з однією ногою, впорався з поштовхами інженерів і стане основою для більш стійких роботів і з більшою кількістю кінцівок. Японські дослідники створили алгоритм, який вчить робота підлаштовувати свої суглоби та триматися рівно навіть за несподіваних нахилів підлоги чи катання у візку. Така адаптація потребувала від вчених трьох суглобів для робота та контролера руху, який враховує інерцію і кутовий момент, а як робот справився з випробуваннями, вони описали у Autonomous Robots.
New Scientist / YouTube
Кому потрібен одноногий робот-стрибун?
Спритність і надійність — дві основні характеристики, яких очікують від сучасного робота з ногами. Наприклад, Boston Dynamics зі своїми чотириногими, які і потанцюють в студії, і по лісі побігають, ще і корисне навантаження прихоплять. Однак, хоч існує і величезний вибір таких роботів із будь-якою кількістю ніг, переважна більшість використовує специфічну для них конструкцію та алгоритми, що значно обмежує їхнє використання. Тому у цій роботі дослідники технологічного інституту Toyota зосередилися на розробці універсального контролера рухів для будь-якого класичного робота з кінцівками на стандартних приводах. Загалом, маневреність визначається як здатність робота прискорюватися, адже вона дає змогу певним чином змінювати його швидкість, щоб той краще адаптувався до умов. У людей та тварин зміна швидкості запускає механізми, які регулюють так звані фазові переходи ходи, тобто від ходьби до бігу або навпаки.
Таким чином, з точки зору маневреності, біг є надзвичайно важливим вмінням, якщо ми говоримо про здатність робота триматися рівно на ногах у динамічному середовищі. Крім того, біг має на увазі і піднімання ніг, що ускладнює завдання інженерам. Тому єдино можливою концепцією є підходи із контролерами для всього тіла, що регулюватимуть всі параметри робота. Однак, вони у більшості покладаються на онлайн-оптимізацію, виконання якої в реальному часі вимагає великих обчислювальних ресурсів. З огляду на той факт, що вбудований процесор може знадобитися виконання інших складних обчислювальних задач, наприклад, зір робота, використання значної частини обчислювальної потужності позбавляє робота ефективності і продуктивності. Тож ще однією метою цих випробувань над одноногим роботом простої будови стала розробка контролера для пересування, що зможе контролювати робота у режимі реального часу за мілісекунди та за допомогою стандартного вбудованого процесора.
New Scientist / YouTube
Навіщо вчені катали робота у візку?
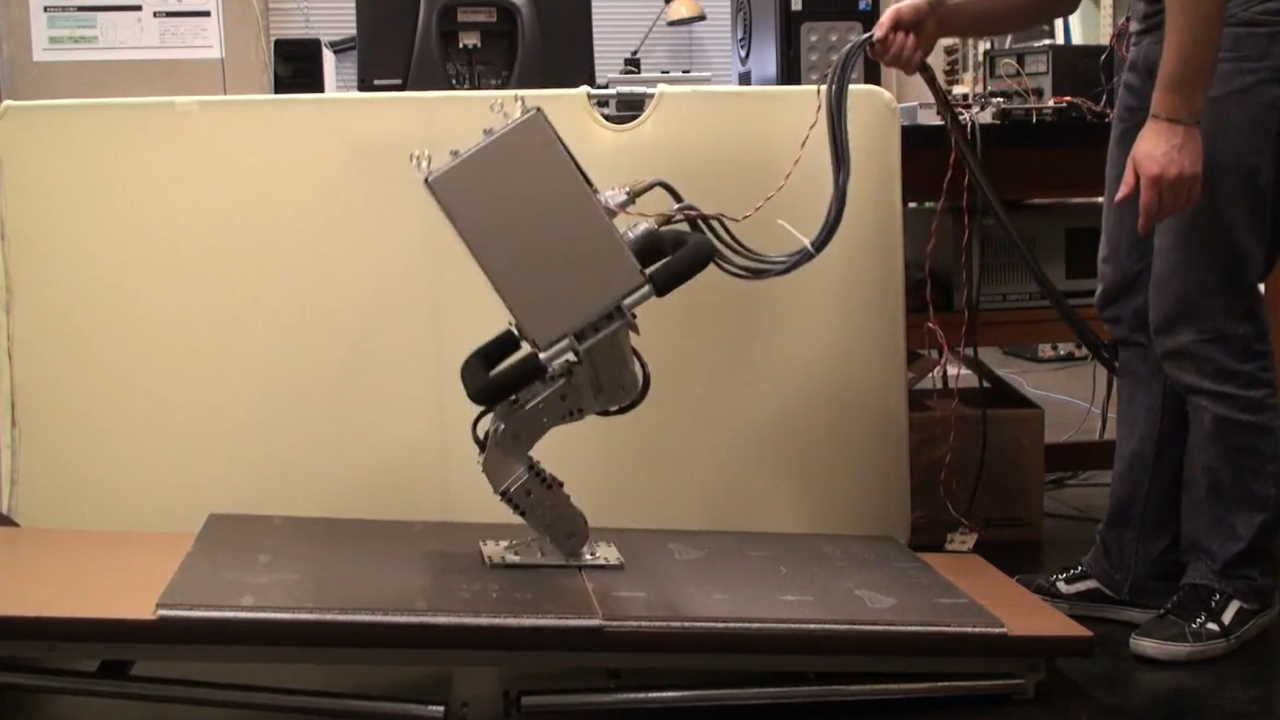
Як ми вже вказали, задачею дослідників було пристосувати робота для бігу, тож під час руху він мав навчитися регулювати інерційні сили, що діють на центр мас, а також знаходити компроміс між їхнім положенням і значенням. Пропонований вченими генератор траєкторії, який спирається на відчуття робота щодо зміни інерційних сил, а також на пов'язаний з цим кутовий момент. Такий алгоритм управління дозволив одноногому роботу традиційної конструкції демонструвати маневреність у балансуванні і пересуванні, наприклад, під час бігу навіть нестабільними площинами. Роботу на ім'я TTI-Hopper не завадила жорсткість конструкції з чотирьох ланок і трьох суглобів-ступенів свободи, а за словами дослідників, у порівнянні з існуючими методами, запропонований алгоритм дає змогу балансувати між обчислювальною складністю та ефективністю управління рухом. Для роботи з алгоритмом TTI-Hopper знадобилися також датчик положення в торсі та чотири блоки вимірювання сили, які розподілили по всій площині стопи єдиної ноги. Метою експериментів було перевірити робота на маневреність, гнучкість до різних умов та вміння триматися на ногах, тож вчені і вирішили поштовхати його, покатати візком, змусити пострибати навіть по похилій поверхні та за її перевертання.
Куди дострибався робот?
З роботом провели чотири випробування. Спершу він мав втриматися на рухомому вперед і назад інженером візку. Експеримент проводили зі звичайним та оновленим контролерами руху і саме з другим робот припинив перекидатися назад, а зміг втриматися на своїй нозі. Здатність рухатися TTI-Hopper продемонстрував вісьмома послідовними стрибками, яких без контролера йому вдалося зробити всього три. Ще одна корисна властивість пропонованого контролера — це здатність підвищувати піддатливість, щоб справлятися з ударами об землю. Сила від стрибка сягала 200 ньютонів, але через правильне приземлення (на відміну від приземлень без контролера), датчики допомагали роботу стати так, щоб компенсувати удар від стрибка. Коли робот не може цього зробити, удар передається на верхню частину тіла, що може привести до небажаних рухів тулуба. Без контролера тулуб змістився на 17 градусів на секунду у той час, як із контролером швидкість зміщення варіювалася від нуля до всього трьох градусів на секунду — він добре тримався рівно.
New Scientist / YouTube
Щоб спостерігати ефект від запропонованого генератора траєкторії, вчені провели експерименти з бігом на одній нозі на плоскій поверхні, якою робот безперервно стрибав вперед понад десять разів. Із планувальником траєкторії робот, орієнтуючись на своє відчуття інерції, міг рівно пройтися у той час, як без нього, відхилявся з доріжки. Також наостанок вчені вирішили скинути TTI-Hopper з дошки, але і тут робот втримав рівновагу завдяки своїм суглобам і самовідчуттю.
New Scientist / YouTube
Так, за словами дослідників, запропонований контролер може допомогти роботам з будь-якою кількістю ніг зберігати рівновагу, а також приймати рішення щодо маршруту всього за 2,5-10 мілісекунд, на що не потрібно буде шукати додаткових обчислювальних потужностей. Універсальні алгоритми мають розширити роботам кількість завдань, які вони можуть виконувати, а також збільшити функціональні можливості. Так, наприклад, нещодавно ми розповідали про універсальний алгоритм для маніпуляторів, що зможе перетворити будь-якого робота на аерохокеїста та вправного оператора.





