Розробники штучного інтелекту Facebook сумісно з інженерами університету Карнегі-Меллон представили надчутливу електронну шкіру ReSkin, яка наділить роботів відчуттям дотику, а також може стати основою для протезів або натільних девайсів. Це триміліметрова гнучка мембрана, яка збирає дані про дотик за змінами магнітного поля, а також може допомогти роботу контролювати свої сили за допомогою алгоритмів навчання і, наприклад, не чавити чорниці при торканні. Деталі проєкту доступні на його сайті, а коротко про концепцію розповіли у блозі.
Facebook AI
Що чіпають роботи?
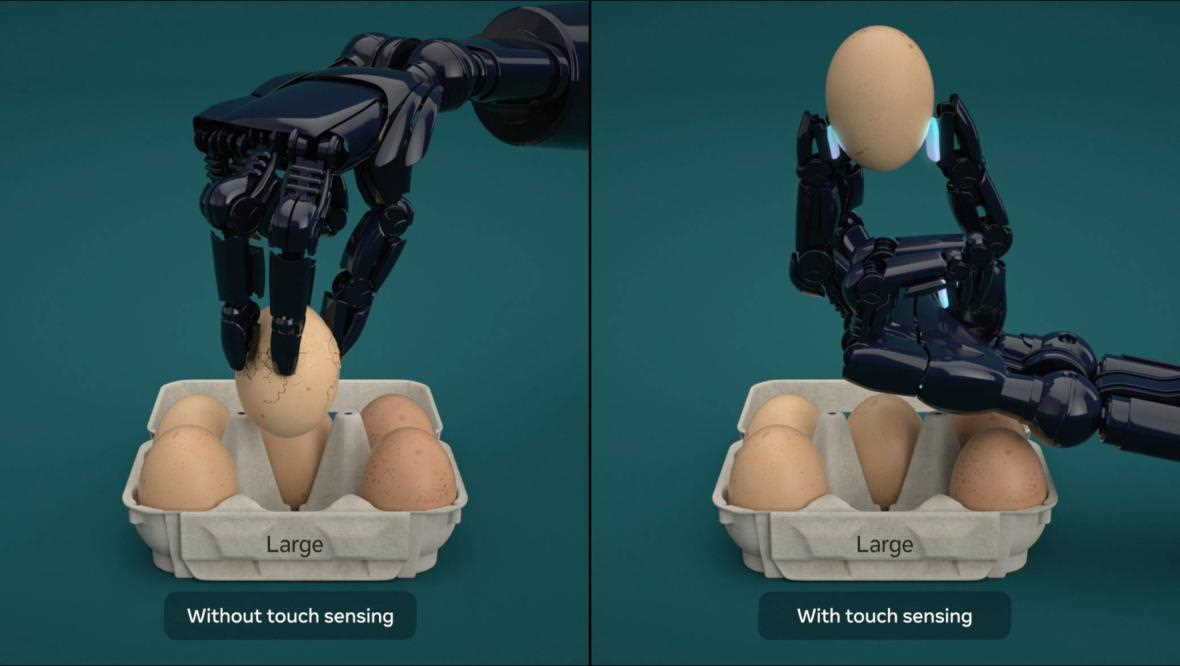
Насправді від того, яким світ видається на дотик, залежить величезна кількість стратегій того, як ви з ним взаємодіятимете. Несвідомо ви підлаштовуєтеся під свої тактильні відчуття і так стискаєте предмет міцніше, якщо він здається важким або, навпаки, обережніше торкатиметеся, якщо він видається тендітним. Втім, поки навіть немовлятам вдається виконувати доволі складні маніпуляції, роботи продовжують боротися навіть із простими завданнями з утриманням речей у руках.
У контексті робототехніки та штучного інтелекту дотик має забезпечити контакт для стабільного захоплення та маніпуляції з предметами, точні вимірювання сили стиснення та зсуву і, що особливо важливо, покриття великої площі поверхні з гарною просторовою роздільною здатністю для отримання тактильної інформації у всіх точках контакту. Інженерні рішення мають бути універсальними, недорогими та довговічними, але поки вони повільно працюють і вимагають безлічі з'єднань, які ведуть до проблем з інтеграцією та експлуатацією.
Facebook AI
Як працює штучний дотик?
М'які сенсорні оболонки надають тактильну чи пропріоцептивну інформацію, не впливаючи на основну механіку системи. Дотик є значенням сили, її точним положенням, кутом і видом взаємодії. Дані сенсорів обробляються алгоритмами і допомагають роботам розрізняти поверхні та ідентифікувати предмети на дотик, а також планувати свої рухи і формувати план дій щодо них. Це їм потрібно, щоб порозумітися і з предметами, з якими мають працювати, і з людьми поруч.
Інженери поступово відмовилися від твердих датчиків на користь м'яких матеріалів, але існує дві основні причини, через які сенсорна шкіра все ще не є найкращим рішенням для тактильного сприйняття. По-перше, існує прямий компроміс між м'якими матеріалами, які забезпечують піддатливість, та їхнім терміном експлуатації. М'які сенсори ідеальні для спритних маніпуляцій, але схильні до руйнування та вимагають набагато складніших алгоритмів обробки даних від одного датчика до іншого.
Тому розробники Meta AI (які донедавна були Facebook AI) та інженери університету Карнегі-Меллон вирішили взяти звичайний полімер, який має вищі експлуатаційні характеристики, але позбавити майбутню електронну шкіру прямих електричних з'єднань між схемою та еластоміром. Це ідеально для зниження вартості, оскільки дасть змогу змінювати лише зношений еластомер, а сама система продовжить роботу. Головним принципом їхнього штучного дотику стало магнітне зондування — магнітні частки в еластомері вкажуть магнітометрам системи на взаємодію, відповідаючи на деформацію зі сторони. Зміна магнітного потоку декодується в положення та величину контактної сили, а алгоритми вже вирішать, що з цими даними робити.
Наскільки чутлива шкіра?
Створений розробниками ReSkin є розтяжною і гнучкою еластомірною мембраною, товщиною від двох до трьох міліметрів, із вбудованими магнітними мікрочастинками. Використання магнітних мікрочастинок дозволяє надавати шкірі різні форми, а тому її легко масштабувати і на більші площі, ніж кінчики пальців роботів. Принцип чутливості ReSkin ґрунтується на зміні відносної відстані між вбудованими магнітними мікрочастинками в еластомірній матриці та найближчим магнітометром.
Дослідники також представили алгоритм із відкритим вихідним кодом, який дозволить обробляти ці дані. Так, щоб продемонструвати концепцію, вони змусили маніпулятор взяти зі столу ягоди винограду та чорниці. Захоплення м'яких і тендітних предметів потребує зворотний зв'язок за силою — занадто велике зусилля розчавить їх. І вбудованого виміру сили в маніпуляторі (близько 30 ньютонів) виявилося недостатнім, щоб уберегти продукт від руйнування. А ось із ReSkin ягоди вдалося залишити цілими. Щоб продемонструвати точність датчиків, їх причепили на взуття собаки та відправили її гуляти парком. Датчик відстежив величину та напрямок прикладеної сили під час відпочинку, ходьби та бігу. Зрештою система не втратила своєї чутливості і на великій площі, де для вимірювання знадобилося 40 магнітометрів.
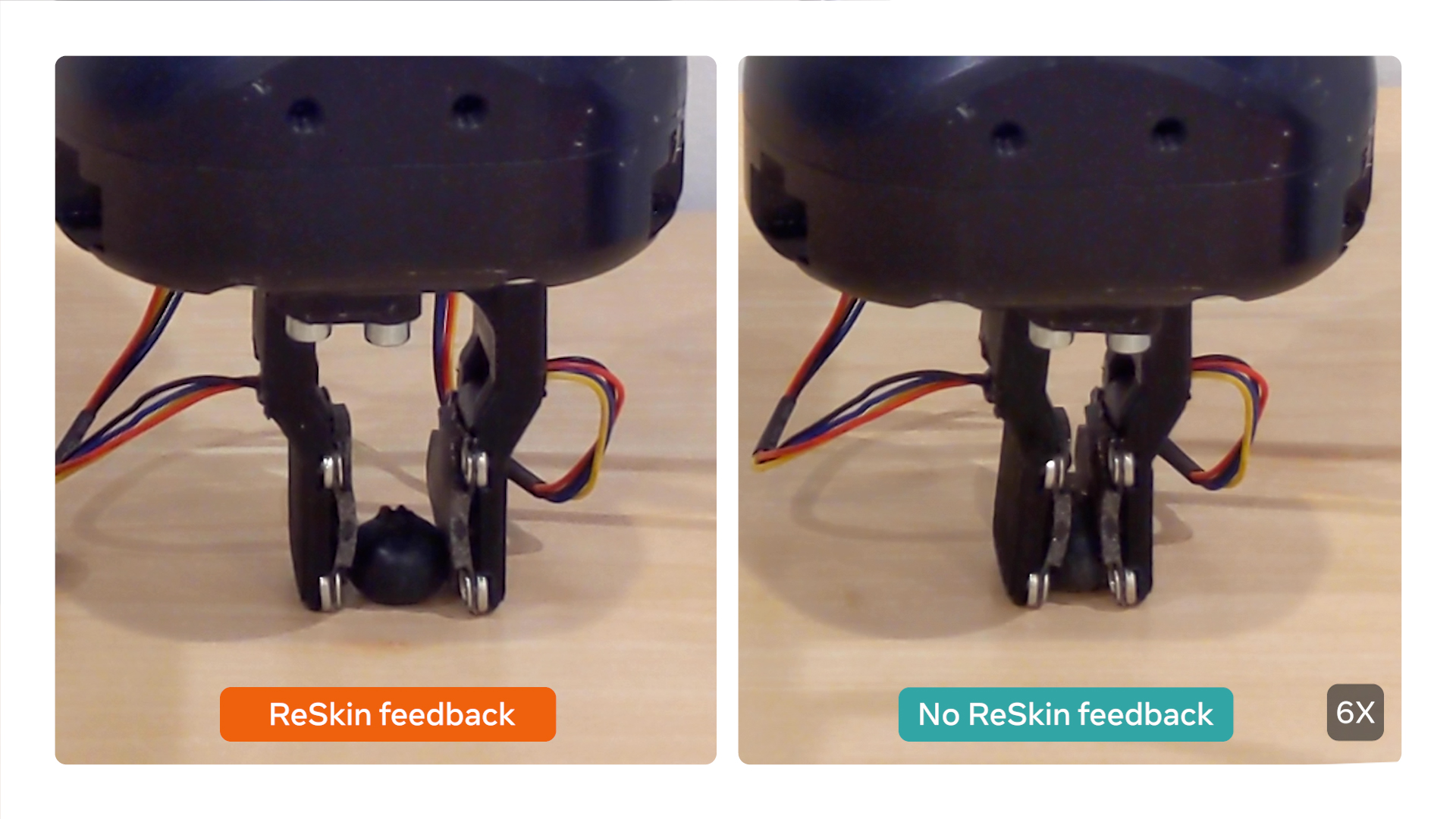
Успіх робота з ReSkin з ягодами/ Facebook AI
Розробники вважають, що розвиток сенсорного сприйняття допоможе дослідникам штучного інтелекту покращувати його і так створювати більш здатних роботів, які зможуть враховувати як візуальні, так і тактильні відчуття. Такі датчики допоможуть у розвитку технологій віртуальної чи доповненої реальності, яким відчуття дотику теж не вистачає, а також можуть стати частиною натільних девайсів, які таким чином зможуть збирати дані про вашу активність.
Більше про відчуття роботів ми розповідали у нашому матеріалі «Як роботи дивляться на світ, яке вино їм смакує та чому Ілон Маск знову проти всіх», а також nauka.ua писала, як сенсори електронної шкіри для техніки вдалося замінити сонячними елементами, а людський піт допоміг рукавичці відрізнити повітряну кульку від склянки.


